搜索到
13
篇与
视频生成
的结果
-
 AIGC 每日速读|2026-06-01|英伟达SANA单卡24FPS实时流式视频编辑 今日 AIGC 论文速览 今日共 8 篇 · 实时/高效视频生成 2 篇 · 视频世界模型 2 篇 · 统一多模态生成 2 篇 · 音频生成 2 篇 重点论文标题列表 SANA-Streaming(NVIDIA, MIT):单卡RTX5090实时流式视频编辑 LVSA(开源·JiusiServe):免训练长视频稀疏注意力3x提速 Lumos-Nexus(NUS, 阿里达摩院):高效统一视频生成推理驱动 DecMem(快手可灵, 港大 HKU):解耦记忆做分钟级一致世界生成 Light Interaction(浙江大学, NVIDIA):免训练交互视频世界模型加速 今日论文速览 1. SANA-Streaming:单卡RTX5090实时流式视频编辑 SANA-Streaming: Real-time Streaming Video Editing with Hybrid Diffusion Transformer | NVIDIA, MIT | arXiv:2605.30409 关键词:实时视频编辑·混合DiT·GDN线性注意力·RTX5090·英伟达 前序问题:实时流式视频到视频编辑(V2V)对直播、游戏等交互应用至关重要,但它对时序一致性和推理吞吐都有极苛刻的要求——既要逐帧流式出片、又要保住跨帧一致,还得在消费级 GPU 上跑得动,前人一直没能同时满足 本文贡献:SANA-Streaming:系统-算法协同设计的高分辨率实时流式视频编辑框架,三件套。(1) Hybrid DiT:在 SANA-Video 全线性骨干里均匀插入 5 个 softmax 注意力块 + 15 个高效 Gated DeltaNet(GDN) 块,用线性块保效率、softmax 块补局部建模与首块一致性,恒定显存 + 任意长度;(2) Cycle-Reverse 正则:用 flow matching 从生成内容反向预测源帧来强制语义一致,无需成对长编辑视频;(3) 面向 NVIDIA Blackwell(RTX 5090) 的系统协同:融合 GDN kernel + 混合精度量化(MPQ) 拉满 Tensor Core 实验效果:单张 RTX 5090 上做到 1280×704 分辨率、24 端到端 FPS 的实时编辑,DiT 核心跑到 58 FPS;混合设计相比纯 softmax 变体长视频生成只需 5.56GB 显存、提速 3.7×;在时序连贯性和系统吞吐上都显著超越现有 SOTA 批判点评:「混合线性/softmax DiT + 反向一致性正则 + 面向 5090 的量化协同」把实时视频编辑从「论文 demo」真正推到「消费级单卡可跑」,24FPS 端到端是非常硬的工程里程碑;恒定显存是流式落地的关键。但 2B 模型的编辑能力上限、复杂语义编辑的保真度、以及对 5090 之外硬件的可移植性还需观察;Cycle-Reverse 正则在大幅度编辑下的稳定性值得追踪 2. LVSA:免训练长视频稀疏注意力3x提速 LVSA: Training-Free Sparse Attention for Long Video Diffusion | 开源·JiusiServe | arXiv:2605.31057 关键词:长视频扩散·免训练稀疏注意力·旋转全局锚点·Wan/Hunyuan·昇腾NPU 前序问题:稠密自注意力是长视频扩散推理的算力和质量双瓶颈:开销随序列长度二次增长,且超过训练长度后模型收敛到「近静态」——画面冻结、重复循环。现有方案要么太贵(要重训),要么在「提速 + 保质」上无法同时可扩展地满足 本文贡献:LVSA(Long Video Sparse Attention):免训练、模型无关的 block-sparse 注意力,把结构化窗口模式 + 旋转全局锚点(rotating global anchors) 结合,去掉「固定网格偏置」这一长程时序伪影的根因;配 FlashInfer kernel 落地,且天生支持多 GPU(context-parallel + sparse ring KV 交换)。还提出 VQeval 评测工具,专门给「循环/冻结」失败正确扣分(这类失败在 VBench-Long 等评测里反而被奖励) 实验效果:在 6× 训练长度下 Wan2.1-1.3B 提速 3.17×、Wan2.1-14B 提速 2.98×,HunyuanVideo 1.5 在 1.5× 长度提速 3.33×,还能让 HY1.5 跑到单卡原本 OOM 的 2× 长度;相比 RIFLEx/UltraViCo 分别快 2.41×/3.27×;在昇腾 NPU 上 Wan2.2-A14B/Wan2.1-1.3B 也提速 2.71×/3.24×。训练长度内质量中性、超长时质量为正 批判点评:「旋转全局锚点 + 结构化窗口」去掉固定网格偏置,是把「超训练长度变冻结」这一长视频顽疾从根上治理的漂亮思路;免训练 + 多 GPU + 跨 GPU/NPU 的工程完整度很高,VQeval 还顺手补了「循环失败被错误奖励」的评测漏洞。但 block-sparse 的固定模式对极复杂运动场景是否丢细节需要看;锚点数量与长度的 scaling 关系、与可训练稀疏(VSA 类)的质量上限对比可更深入 3. Lumos-Nexus:高效统一视频生成推理驱动 Lumos-Nexus: Efficient Frequency Bridging with Homogeneous Latent Space for Video Unified Models | NUS, 阿里达摩院 | arXiv:2605.31603 关键词:统一视频生成·频率桥接·推理驱动·VR-Bench·阿里达摩院 前序问题:基于 connector 的统一视频模型在「指令理解驱动生成」上能力很强,但把一个大的高保真生成器塞进统一训练循环计算上不可行,从而限制了可达到的画质上限——理解强但画质受限 本文贡献:Lumos-Nexus:训练高效的统一视频生成框架,两阶段设计。训练阶段只把一个轻量生成器与理解模块对齐,学会接收推理驱动的语义控制;推理阶段引入 Unified Progressive Frequency Bridging(UPFB),在共享 latent 空间把生成逐步交棒给高容量预训练生成器,做粗到细精修,从而在不牺牲推理质量的前提下产出高保真视频。还提出 VR-Bench 专门评测「把推断意图翻译成连贯且语义对齐视频」的能力 实验效果:在 VBench 上视觉真实度与时序连贯性大幅提升,同时在 VR-Bench 上展现强推理驱动生成性能;用「轻量训练 + 推理时频率桥接交棒」绕开了「把大生成器塞进训练循环」的算力死结 批判点评:「训练只对齐轻量生成器、推理时再用频率桥接交棒给大模型」是把统一模型「理解-生成」解耦的聪明工程,既省训练又保画质;VR-Bench 把「推理对齐」立成新评测维度很有意义。但 UPFB 的交棒边界(何时交、交多少)对画质/语义一致的影响、两个生成器在共享 latent 的兼容性细节需要更多 ablation 4. DecMem:解耦记忆做分钟级一致世界生成 DecMem: Towards Minute-Long Consistent World Generation with Decoupled Memory | 快手可灵, 港大 HKU | arXiv:2605.31336 关键词:世界模型·解耦记忆·长视频一致性·分钟级生成·快手可灵 前序问题:视频生成模型推动了可控世界模型快速进展,但在长程推理下维持细粒度时空一致性仍是核心难题——朴素的可学习记忆架构有两大根本缺陷:计算低效 + 注意力发散(attention dispersion) 本文贡献:DecMem:超越显式 3D 记忆和粗粒度帧级隐式建模,提出细粒度、可学习、可扩展的记忆。先系统分析注意力发散问题,再用解耦记忆架构:Sparse Global Memory 负责对全局历史的高效细粒度访问,Anchored Local Memory 负责稳定高质量的外推。两者解耦,分别解决「效率」和「外推稳定」 实验效果:大量实验显著超越当前 SOTA;通过精确高效的长期记忆 + 更强外推能力,DecMem 实现分钟级、高保真、高一致的可控长视频生成 批判点评:把「记忆」拆成 Sparse Global(管全局访问效率)+ Anchored Local(管外推稳定)两条解耦通路,直击长视频记忆「又要全又要稳还要快」的三难,分钟级一致是世界模型很硬的指标。但解耦记忆的额外参数/显存开销、Sparse Global 的检索精度上限、以及与显式 3D 记忆在强几何一致场景的对比可更充分 5. Light Interaction:免训练交互视频世界模型加速 Light Interaction: Training-Free Inference Acceleration for Interactive Video World Models | 浙江大学, NVIDIA | arXiv:2605.31158 关键词:交互世界模型·免训练加速·自适应计算·3D稀疏注意力·浙大 前序问题:交互式视频世界模型逐块生成、响应用户控制的相机运动(实时游戏模拟、虚拟场景漫游、具身 AI 训练),但扩到长交互轨迹代价极高:上下文记忆增长、注意力二次复杂度、反复去噪步骤 本文贡献:Light Interaction:免训练的交互式视频世界模型推理加速框架。核心洞察是「交互天然带来轨迹相关的自适应计算」——新探索时检索到的空间记忆可丢弃、时序上下文可按局部 latent 动态调整、相机重访熟悉区域时早期步输出可复用。据此组合自适应上下文管理 + 去噪缓存加速 + 软硬协同的 3D block-sparse 注意力(融合 Triton kernel) 实验效果:在 HY-WorldPlay 和 Matrix-Game-3.0 上无需重训即取得最高 2.59× 提速,同时保持有竞争力的视觉质量 批判点评:「交互轨迹本身就提供了该算多少的信号」是很锐利的洞察——重访可复用、新探索可丢记忆,把自适应计算和交互语义绑定,免训练即插即用对落地友好。但收益高度依赖轨迹的「重访比例」,在持续探索新场景的轨迹上加速会打折;3D block-sparse 的质量损失边界、与 minWM 类自回归蒸馏路线的组合潜力值得探索 6. Representation Forcing:去VAE瓶颈的统一多模态 Representation Forcing for Bottleneck-Free Unified Multimodal Models | 港大 HKU, 字节 Seed | arXiv:2605.31604 关键词:统一多模态·去VAE·表征强制·像素空间生成·字节Seed 前序问题:统一多模态模型(UMM)想用单一模型同时做感知和生成,但现有 UMM 仍依赖一个冻结、单独预训练的 VAE 做图像生成,构成结构性瓶颈;而直接去掉 VAE 又会带来质量缺口——模型得从原始像素同时学高层结构和底层细节 本文贡献:Representation Forcing(RF):让「表征预测」成为模型的原生能力来弥合这一缺口。具体是强制 decoder 在出像素前先自回归预测视觉表征作为中间 token,这些 token 留在 context 里、在同一 backbone 内引导像素扩散。把表征从「感知的输出」变成「生成的目标」,从而彻底不需要任何外部生成式 latent 空间 实验效果:RF 对理解和生成双双有益:图像生成上,像素空间 + RF 的模型匹配 SOTA 的 VAE 版统一模型;图像理解上,像素空间 RF 普遍优于其 VAE 版变体——朝着端到端、无瓶颈的 UMM 迈出有效一步 批判点评:「先自回归预测视觉表征 token 再扩散出像素」把外挂 VAE 的结构瓶颈内化成模型原生能力,是统一模型「去外部 latent」方向很干净的解法,且理解/生成同时受益说明表征-生成共享是对的。但自回归预测表征 token 引入的推理开销、表征 token 的设计对不同分辨率/模态的可扩展性、以及相比强 VAE 版在超高保真上的差距需要更多验证 7. SwanSphere:全景视频流式生成空间音频 Towards Streaming Synchronized Spatial Audio Generation via Autoregressive Diffusion Transformer | 浙江大学 | arXiv:2605.30940 关键词:空间音频·流式生成·自回归扩散·全景视频·浙大 前序问题:实时准确的空间音频生成对沉浸式体验至关重要,但现有空间音频合成技术常受困于「生成质量 vs 高推理延迟」的取舍,且难以从多模态输入中捕获精确的空间信息 本文贡献:SwanSphere:从全景视频 + 文本提示生成高保真空间音频的统一流式框架。三大贡献:(1) 因果自回归扩散 transformer 架构,支持流式高质量空间音频生成;(2) Spatial Video-Audio Contrastive(SVAC) 对比学习把视频编码器对齐到声学域,再用多目标在线直接偏好优化(ODPO) 增强空间感知与多模态空间音频合成的鲁棒性;(3) 针对当前空间音频数据稀缺,开发自动标注 pipeline 生成详细空间 caption 实验效果:在 video-to-spatial 和 text-to-spatial 两类空间音频生成任务上均取得更优性能 (demo swanaigc.github.io) 批判点评:「因果 AR 扩散做流式 + SVAC 跨模态对齐 + ODPO 偏好优化 + 自动空间标注」一套组合直击空间音频「质量/延迟/数据」三重痛点,从全景视频生成空间音频是 VR/沉浸式应用很实在的能力,与同组 SwanVoice 一道补齐音频生成的空间维度。但空间音频评测主观性强、客观指标尚不统一;ODPO 的奖励设计与全景视频的空间精度上限还需更多披露 8. SwanVoice:长篇零样本对话语音合成 SwanVoice: Expressive Long-Form Zero-Shot Speech Synthesis for Both Monologue and Dialogue | 浙江大学, 字节 | arXiv:2605.30993 关键词:零样本TTS·长篇对话·flow-matching·DiffusionNFT·浙大 前序问题:零样本 TTS 在单说话人合成上已大幅进步,但富有表现力的长篇多说话人对话仍很难。常见做法是用独白 TTS 逐句合成再拼接——增加推理成本,且常破坏跨轮次的声学一致性、对话连贯性和情感连续性。近期对话 TTS 仍难同时兼顾表现力一致、可控说话人切换和独白质量 本文贡献:SwanData-Speech + SwanVoice。数据侧用 Swan Forced Aligner 做停顿感知的词级对齐、RobustMegaTTS3 处理发音困难样本,从野外音频构建独白与对话语料。SwanVoice 是 1–4 人零样本 TTS:25Hz VAE + 带停顿符号与拼音替换的原始文本条件 + 带说话人轮次条件的 flow-matching DiT;训练从独白起步,经混合与真实对话数据,再用 DiffusionNFT 后训练 + 音素级和说话人相似度奖励 实验效果:在 SwanBench-Speech 上,独白与对话设置下的丰富度与层次分都高于所有评测的开源基线,内容准确率仍是主要限制 (demo swanaigc.github.io) 批判点评:把长篇对话 TTS 从「逐句独白拼接」升级成端到端建模,flow-matching DiT + 说话人轮次条件 + DiffusionNFT 后训练这套组合很完整,停顿感知对齐的数据工程是务实加分项。但作者自承内容准确率(WER/CER) 仍是短板,说明表现力和保真度的 trade-off 还在;25Hz 低帧率 VAE 在高保真音质上的天花板、4 人以上对话的可扩展性需要继续看 趋势观察 实时/高效视频生成进入「系统-算法协同」深水区 — SANA-Streaming 用混合 DiT(softmax + GDN 线性)+ Cycle-Reverse 正则 + 面向 RTX5090 的混合精度量化,在单张消费级 GPU 做到 1280×704、24 端到端 FPS 的实时流式视频编辑;LVSA 免训练 block-sparse + 旋转全局锚点,把 Wan2.1/HunyuanVideo 长视频推理提速最高 3.3×、还跨 GPU/NPU——视频生成的「实时化」正从算法和系统两端被同时撬动 视频世界模型的两大瓶颈——长程一致性与交互推理成本——被正面攻坚 — DecMem 用 Sparse Global + Anchored Local 解耦记忆,把可控世界生成推到分钟级一致;Light Interaction 抓住「交互天然带来轨迹相关的自适应计算」,免训练把 HY-WorldPlay/Matrix-Game-3.0 推理加速 2.59×——世界模型从「能生成」转向「长得住、跑得起」 统一多模态正在拆掉「外挂 VAE」这块结构性瓶颈 — Representation Forcing 让 decoder 先自回归预测视觉表征作为中间 token、再在同一 backbone 内引导像素扩散,像素空间模型即可匹配 VAE 版统一模型且理解更强;Lumos-Nexus 用渐进频率桥接把生成交棒给高容量预训练生成器、在共享 latent 做粗到细——统一模型在「去外部 latent」和「高保真」两条线同时推进 推理驱动 / 可控成为视频生成的新评测维度 — Lumos-Nexus 提出 VR-Bench 专测「把推理意图翻译成连贯视频」的能力;视频生成的评测从「画质 + 时序」扩展到「推理对齐」——可控性的内涵正在变深,生成模型被要求「不仅画得好,还要想得对」 音频生成从「单声道说话」走向「长篇对话 + 空间声场」 — SwanVoice 用 25Hz VAE + flow-matching DiT + DiffusionNFT 后训练做 1–4 人长篇零样本对话 TTS,富有表现力且说话人切换可控;SwanSphere 用因果自回归扩散 + SVAC 跨模态对齐 + ODPO,从全景视频/文本流式生成高保真空间音频——音频生成正在「对话连贯性」和「空间沉浸感」两个维度同时进化,补齐视觉生成之外的听觉一环 人工智能炼丹君 整理 | 2026-06-01 更多 AIGC 论文解读,关注微信公众号「人工智能炼丹君」 每日更新 · 论文精选 · 深度解读 · 技术脉络 微信搜索 人工智能炼丹君 或扫描下方二维码关注
AIGC 每日速读|2026-06-01|英伟达SANA单卡24FPS实时流式视频编辑 今日 AIGC 论文速览 今日共 8 篇 · 实时/高效视频生成 2 篇 · 视频世界模型 2 篇 · 统一多模态生成 2 篇 · 音频生成 2 篇 重点论文标题列表 SANA-Streaming(NVIDIA, MIT):单卡RTX5090实时流式视频编辑 LVSA(开源·JiusiServe):免训练长视频稀疏注意力3x提速 Lumos-Nexus(NUS, 阿里达摩院):高效统一视频生成推理驱动 DecMem(快手可灵, 港大 HKU):解耦记忆做分钟级一致世界生成 Light Interaction(浙江大学, NVIDIA):免训练交互视频世界模型加速 今日论文速览 1. SANA-Streaming:单卡RTX5090实时流式视频编辑 SANA-Streaming: Real-time Streaming Video Editing with Hybrid Diffusion Transformer | NVIDIA, MIT | arXiv:2605.30409 关键词:实时视频编辑·混合DiT·GDN线性注意力·RTX5090·英伟达 前序问题:实时流式视频到视频编辑(V2V)对直播、游戏等交互应用至关重要,但它对时序一致性和推理吞吐都有极苛刻的要求——既要逐帧流式出片、又要保住跨帧一致,还得在消费级 GPU 上跑得动,前人一直没能同时满足 本文贡献:SANA-Streaming:系统-算法协同设计的高分辨率实时流式视频编辑框架,三件套。(1) Hybrid DiT:在 SANA-Video 全线性骨干里均匀插入 5 个 softmax 注意力块 + 15 个高效 Gated DeltaNet(GDN) 块,用线性块保效率、softmax 块补局部建模与首块一致性,恒定显存 + 任意长度;(2) Cycle-Reverse 正则:用 flow matching 从生成内容反向预测源帧来强制语义一致,无需成对长编辑视频;(3) 面向 NVIDIA Blackwell(RTX 5090) 的系统协同:融合 GDN kernel + 混合精度量化(MPQ) 拉满 Tensor Core 实验效果:单张 RTX 5090 上做到 1280×704 分辨率、24 端到端 FPS 的实时编辑,DiT 核心跑到 58 FPS;混合设计相比纯 softmax 变体长视频生成只需 5.56GB 显存、提速 3.7×;在时序连贯性和系统吞吐上都显著超越现有 SOTA 批判点评:「混合线性/softmax DiT + 反向一致性正则 + 面向 5090 的量化协同」把实时视频编辑从「论文 demo」真正推到「消费级单卡可跑」,24FPS 端到端是非常硬的工程里程碑;恒定显存是流式落地的关键。但 2B 模型的编辑能力上限、复杂语义编辑的保真度、以及对 5090 之外硬件的可移植性还需观察;Cycle-Reverse 正则在大幅度编辑下的稳定性值得追踪 2. LVSA:免训练长视频稀疏注意力3x提速 LVSA: Training-Free Sparse Attention for Long Video Diffusion | 开源·JiusiServe | arXiv:2605.31057 关键词:长视频扩散·免训练稀疏注意力·旋转全局锚点·Wan/Hunyuan·昇腾NPU 前序问题:稠密自注意力是长视频扩散推理的算力和质量双瓶颈:开销随序列长度二次增长,且超过训练长度后模型收敛到「近静态」——画面冻结、重复循环。现有方案要么太贵(要重训),要么在「提速 + 保质」上无法同时可扩展地满足 本文贡献:LVSA(Long Video Sparse Attention):免训练、模型无关的 block-sparse 注意力,把结构化窗口模式 + 旋转全局锚点(rotating global anchors) 结合,去掉「固定网格偏置」这一长程时序伪影的根因;配 FlashInfer kernel 落地,且天生支持多 GPU(context-parallel + sparse ring KV 交换)。还提出 VQeval 评测工具,专门给「循环/冻结」失败正确扣分(这类失败在 VBench-Long 等评测里反而被奖励) 实验效果:在 6× 训练长度下 Wan2.1-1.3B 提速 3.17×、Wan2.1-14B 提速 2.98×,HunyuanVideo 1.5 在 1.5× 长度提速 3.33×,还能让 HY1.5 跑到单卡原本 OOM 的 2× 长度;相比 RIFLEx/UltraViCo 分别快 2.41×/3.27×;在昇腾 NPU 上 Wan2.2-A14B/Wan2.1-1.3B 也提速 2.71×/3.24×。训练长度内质量中性、超长时质量为正 批判点评:「旋转全局锚点 + 结构化窗口」去掉固定网格偏置,是把「超训练长度变冻结」这一长视频顽疾从根上治理的漂亮思路;免训练 + 多 GPU + 跨 GPU/NPU 的工程完整度很高,VQeval 还顺手补了「循环失败被错误奖励」的评测漏洞。但 block-sparse 的固定模式对极复杂运动场景是否丢细节需要看;锚点数量与长度的 scaling 关系、与可训练稀疏(VSA 类)的质量上限对比可更深入 3. Lumos-Nexus:高效统一视频生成推理驱动 Lumos-Nexus: Efficient Frequency Bridging with Homogeneous Latent Space for Video Unified Models | NUS, 阿里达摩院 | arXiv:2605.31603 关键词:统一视频生成·频率桥接·推理驱动·VR-Bench·阿里达摩院 前序问题:基于 connector 的统一视频模型在「指令理解驱动生成」上能力很强,但把一个大的高保真生成器塞进统一训练循环计算上不可行,从而限制了可达到的画质上限——理解强但画质受限 本文贡献:Lumos-Nexus:训练高效的统一视频生成框架,两阶段设计。训练阶段只把一个轻量生成器与理解模块对齐,学会接收推理驱动的语义控制;推理阶段引入 Unified Progressive Frequency Bridging(UPFB),在共享 latent 空间把生成逐步交棒给高容量预训练生成器,做粗到细精修,从而在不牺牲推理质量的前提下产出高保真视频。还提出 VR-Bench 专门评测「把推断意图翻译成连贯且语义对齐视频」的能力 实验效果:在 VBench 上视觉真实度与时序连贯性大幅提升,同时在 VR-Bench 上展现强推理驱动生成性能;用「轻量训练 + 推理时频率桥接交棒」绕开了「把大生成器塞进训练循环」的算力死结 批判点评:「训练只对齐轻量生成器、推理时再用频率桥接交棒给大模型」是把统一模型「理解-生成」解耦的聪明工程,既省训练又保画质;VR-Bench 把「推理对齐」立成新评测维度很有意义。但 UPFB 的交棒边界(何时交、交多少)对画质/语义一致的影响、两个生成器在共享 latent 的兼容性细节需要更多 ablation 4. DecMem:解耦记忆做分钟级一致世界生成 DecMem: Towards Minute-Long Consistent World Generation with Decoupled Memory | 快手可灵, 港大 HKU | arXiv:2605.31336 关键词:世界模型·解耦记忆·长视频一致性·分钟级生成·快手可灵 前序问题:视频生成模型推动了可控世界模型快速进展,但在长程推理下维持细粒度时空一致性仍是核心难题——朴素的可学习记忆架构有两大根本缺陷:计算低效 + 注意力发散(attention dispersion) 本文贡献:DecMem:超越显式 3D 记忆和粗粒度帧级隐式建模,提出细粒度、可学习、可扩展的记忆。先系统分析注意力发散问题,再用解耦记忆架构:Sparse Global Memory 负责对全局历史的高效细粒度访问,Anchored Local Memory 负责稳定高质量的外推。两者解耦,分别解决「效率」和「外推稳定」 实验效果:大量实验显著超越当前 SOTA;通过精确高效的长期记忆 + 更强外推能力,DecMem 实现分钟级、高保真、高一致的可控长视频生成 批判点评:把「记忆」拆成 Sparse Global(管全局访问效率)+ Anchored Local(管外推稳定)两条解耦通路,直击长视频记忆「又要全又要稳还要快」的三难,分钟级一致是世界模型很硬的指标。但解耦记忆的额外参数/显存开销、Sparse Global 的检索精度上限、以及与显式 3D 记忆在强几何一致场景的对比可更充分 5. Light Interaction:免训练交互视频世界模型加速 Light Interaction: Training-Free Inference Acceleration for Interactive Video World Models | 浙江大学, NVIDIA | arXiv:2605.31158 关键词:交互世界模型·免训练加速·自适应计算·3D稀疏注意力·浙大 前序问题:交互式视频世界模型逐块生成、响应用户控制的相机运动(实时游戏模拟、虚拟场景漫游、具身 AI 训练),但扩到长交互轨迹代价极高:上下文记忆增长、注意力二次复杂度、反复去噪步骤 本文贡献:Light Interaction:免训练的交互式视频世界模型推理加速框架。核心洞察是「交互天然带来轨迹相关的自适应计算」——新探索时检索到的空间记忆可丢弃、时序上下文可按局部 latent 动态调整、相机重访熟悉区域时早期步输出可复用。据此组合自适应上下文管理 + 去噪缓存加速 + 软硬协同的 3D block-sparse 注意力(融合 Triton kernel) 实验效果:在 HY-WorldPlay 和 Matrix-Game-3.0 上无需重训即取得最高 2.59× 提速,同时保持有竞争力的视觉质量 批判点评:「交互轨迹本身就提供了该算多少的信号」是很锐利的洞察——重访可复用、新探索可丢记忆,把自适应计算和交互语义绑定,免训练即插即用对落地友好。但收益高度依赖轨迹的「重访比例」,在持续探索新场景的轨迹上加速会打折;3D block-sparse 的质量损失边界、与 minWM 类自回归蒸馏路线的组合潜力值得探索 6. Representation Forcing:去VAE瓶颈的统一多模态 Representation Forcing for Bottleneck-Free Unified Multimodal Models | 港大 HKU, 字节 Seed | arXiv:2605.31604 关键词:统一多模态·去VAE·表征强制·像素空间生成·字节Seed 前序问题:统一多模态模型(UMM)想用单一模型同时做感知和生成,但现有 UMM 仍依赖一个冻结、单独预训练的 VAE 做图像生成,构成结构性瓶颈;而直接去掉 VAE 又会带来质量缺口——模型得从原始像素同时学高层结构和底层细节 本文贡献:Representation Forcing(RF):让「表征预测」成为模型的原生能力来弥合这一缺口。具体是强制 decoder 在出像素前先自回归预测视觉表征作为中间 token,这些 token 留在 context 里、在同一 backbone 内引导像素扩散。把表征从「感知的输出」变成「生成的目标」,从而彻底不需要任何外部生成式 latent 空间 实验效果:RF 对理解和生成双双有益:图像生成上,像素空间 + RF 的模型匹配 SOTA 的 VAE 版统一模型;图像理解上,像素空间 RF 普遍优于其 VAE 版变体——朝着端到端、无瓶颈的 UMM 迈出有效一步 批判点评:「先自回归预测视觉表征 token 再扩散出像素」把外挂 VAE 的结构瓶颈内化成模型原生能力,是统一模型「去外部 latent」方向很干净的解法,且理解/生成同时受益说明表征-生成共享是对的。但自回归预测表征 token 引入的推理开销、表征 token 的设计对不同分辨率/模态的可扩展性、以及相比强 VAE 版在超高保真上的差距需要更多验证 7. SwanSphere:全景视频流式生成空间音频 Towards Streaming Synchronized Spatial Audio Generation via Autoregressive Diffusion Transformer | 浙江大学 | arXiv:2605.30940 关键词:空间音频·流式生成·自回归扩散·全景视频·浙大 前序问题:实时准确的空间音频生成对沉浸式体验至关重要,但现有空间音频合成技术常受困于「生成质量 vs 高推理延迟」的取舍,且难以从多模态输入中捕获精确的空间信息 本文贡献:SwanSphere:从全景视频 + 文本提示生成高保真空间音频的统一流式框架。三大贡献:(1) 因果自回归扩散 transformer 架构,支持流式高质量空间音频生成;(2) Spatial Video-Audio Contrastive(SVAC) 对比学习把视频编码器对齐到声学域,再用多目标在线直接偏好优化(ODPO) 增强空间感知与多模态空间音频合成的鲁棒性;(3) 针对当前空间音频数据稀缺,开发自动标注 pipeline 生成详细空间 caption 实验效果:在 video-to-spatial 和 text-to-spatial 两类空间音频生成任务上均取得更优性能 (demo swanaigc.github.io) 批判点评:「因果 AR 扩散做流式 + SVAC 跨模态对齐 + ODPO 偏好优化 + 自动空间标注」一套组合直击空间音频「质量/延迟/数据」三重痛点,从全景视频生成空间音频是 VR/沉浸式应用很实在的能力,与同组 SwanVoice 一道补齐音频生成的空间维度。但空间音频评测主观性强、客观指标尚不统一;ODPO 的奖励设计与全景视频的空间精度上限还需更多披露 8. SwanVoice:长篇零样本对话语音合成 SwanVoice: Expressive Long-Form Zero-Shot Speech Synthesis for Both Monologue and Dialogue | 浙江大学, 字节 | arXiv:2605.30993 关键词:零样本TTS·长篇对话·flow-matching·DiffusionNFT·浙大 前序问题:零样本 TTS 在单说话人合成上已大幅进步,但富有表现力的长篇多说话人对话仍很难。常见做法是用独白 TTS 逐句合成再拼接——增加推理成本,且常破坏跨轮次的声学一致性、对话连贯性和情感连续性。近期对话 TTS 仍难同时兼顾表现力一致、可控说话人切换和独白质量 本文贡献:SwanData-Speech + SwanVoice。数据侧用 Swan Forced Aligner 做停顿感知的词级对齐、RobustMegaTTS3 处理发音困难样本,从野外音频构建独白与对话语料。SwanVoice 是 1–4 人零样本 TTS:25Hz VAE + 带停顿符号与拼音替换的原始文本条件 + 带说话人轮次条件的 flow-matching DiT;训练从独白起步,经混合与真实对话数据,再用 DiffusionNFT 后训练 + 音素级和说话人相似度奖励 实验效果:在 SwanBench-Speech 上,独白与对话设置下的丰富度与层次分都高于所有评测的开源基线,内容准确率仍是主要限制 (demo swanaigc.github.io) 批判点评:把长篇对话 TTS 从「逐句独白拼接」升级成端到端建模,flow-matching DiT + 说话人轮次条件 + DiffusionNFT 后训练这套组合很完整,停顿感知对齐的数据工程是务实加分项。但作者自承内容准确率(WER/CER) 仍是短板,说明表现力和保真度的 trade-off 还在;25Hz 低帧率 VAE 在高保真音质上的天花板、4 人以上对话的可扩展性需要继续看 趋势观察 实时/高效视频生成进入「系统-算法协同」深水区 — SANA-Streaming 用混合 DiT(softmax + GDN 线性)+ Cycle-Reverse 正则 + 面向 RTX5090 的混合精度量化,在单张消费级 GPU 做到 1280×704、24 端到端 FPS 的实时流式视频编辑;LVSA 免训练 block-sparse + 旋转全局锚点,把 Wan2.1/HunyuanVideo 长视频推理提速最高 3.3×、还跨 GPU/NPU——视频生成的「实时化」正从算法和系统两端被同时撬动 视频世界模型的两大瓶颈——长程一致性与交互推理成本——被正面攻坚 — DecMem 用 Sparse Global + Anchored Local 解耦记忆,把可控世界生成推到分钟级一致;Light Interaction 抓住「交互天然带来轨迹相关的自适应计算」,免训练把 HY-WorldPlay/Matrix-Game-3.0 推理加速 2.59×——世界模型从「能生成」转向「长得住、跑得起」 统一多模态正在拆掉「外挂 VAE」这块结构性瓶颈 — Representation Forcing 让 decoder 先自回归预测视觉表征作为中间 token、再在同一 backbone 内引导像素扩散,像素空间模型即可匹配 VAE 版统一模型且理解更强;Lumos-Nexus 用渐进频率桥接把生成交棒给高容量预训练生成器、在共享 latent 做粗到细——统一模型在「去外部 latent」和「高保真」两条线同时推进 推理驱动 / 可控成为视频生成的新评测维度 — Lumos-Nexus 提出 VR-Bench 专测「把推理意图翻译成连贯视频」的能力;视频生成的评测从「画质 + 时序」扩展到「推理对齐」——可控性的内涵正在变深,生成模型被要求「不仅画得好,还要想得对」 音频生成从「单声道说话」走向「长篇对话 + 空间声场」 — SwanVoice 用 25Hz VAE + flow-matching DiT + DiffusionNFT 后训练做 1–4 人长篇零样本对话 TTS,富有表现力且说话人切换可控;SwanSphere 用因果自回归扩散 + SVAC 跨模态对齐 + ODPO,从全景视频/文本流式生成高保真空间音频——音频生成正在「对话连贯性」和「空间沉浸感」两个维度同时进化,补齐视觉生成之外的听觉一环 人工智能炼丹君 整理 | 2026-06-01 更多 AIGC 论文解读,关注微信公众号「人工智能炼丹君」 每日更新 · 论文精选 · 深度解读 · 技术脉络 微信搜索 人工智能炼丹君 或扫描下方二维码关注 -
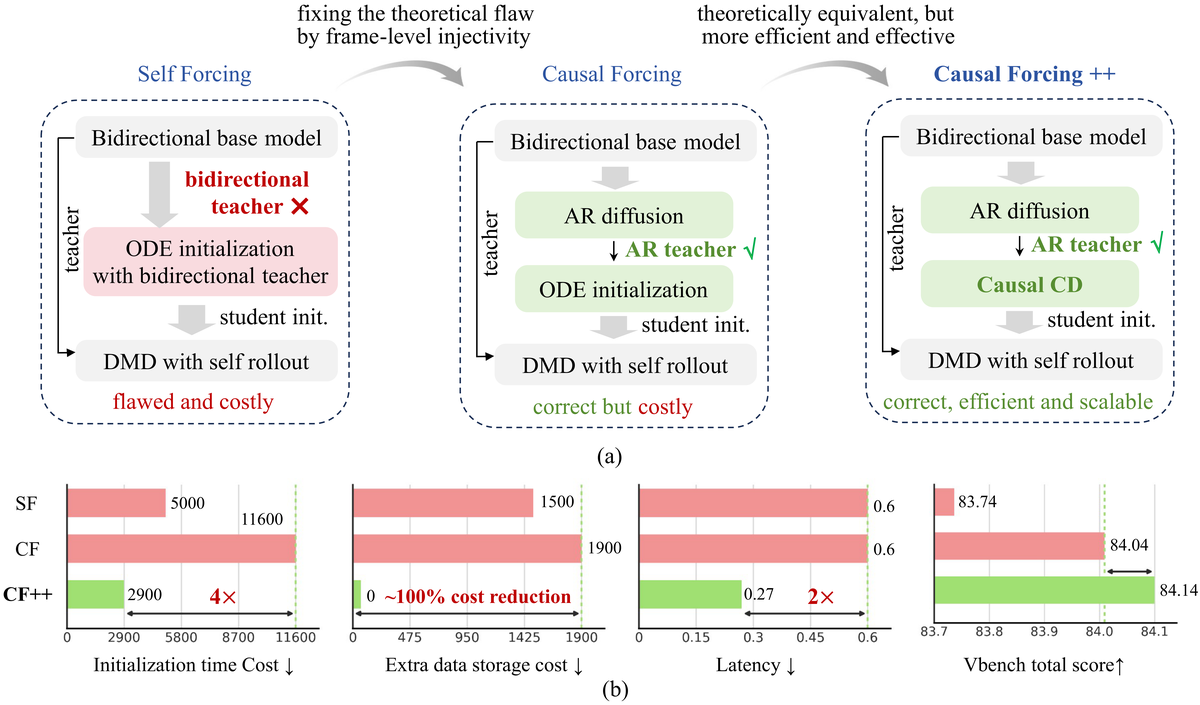
AIGC 每日速读|2026-05-29|生数科技minWM开源实时交互视频世界模型 今日 AIGC 论文速览 今日共 8 篇 · 视频世界模型 3 篇 · 流式视频生成 1 篇 · 音视频联合生成 1 篇 · 可控图像生成与数据 2 篇 · 大模型记忆与微调 1 篇 重点论文标题列表 minWM:实时交互视频世界模型全栈开源 NAVA:原生音视频对齐联合生成6.3B Gamma-World:多智能体生成式世界模型 AdaState:流式视频生成自演化锚点 YoCausal:视频生成因果性认知基准 今日论文速览 1. minWM:实时交互视频世界模型全栈开源 minWM: A Full-Stack Open-Source Framework for Real-Time Interactive Video World Models | 生数科技, 清华大学 | arXiv:2605.30263 关键词:视频世界模型·实时交互·自回归蒸馏·开源·生数科技 前序问题:视频扩散基础模型已能高质量出片,但把它变成实时交互视频世界模型仍然难:交互世界模型需要可控、因果、低延迟的 rollout,实践上要打通数据构造、可控微调、自回归训练、少步蒸馏、流式推理整条链路,而开源社区一直缺一套能跑通的端到端 recipe 本文贡献:minWM:全栈开源框架,把现成的双向 T2V/TI2V 视频基础模型转成「相机可控 + 少步自回归」的世界模型。先对双向扩散做相机控制微调,再用 Causal Forcing / Causal Forcing++ 流程(AR diffusion 训练 + causal ODE/consistency 蒸馏 + 非对称 DMD)蒸成少步自回归生成器做低延迟 rollout。框架模块化、架构可扩展:在 Wan2.1-T2V-1.3B(cross-attention 条件注入)和 HY1.5-TI2V-8B(MMDiT)上分别实例化,还能把 HY-WorldPlay 等已有世界模型适配到新数据分布、训练配方与延迟目标 实验效果:不止放出可运行脚本、checkpoint、文档和推理代码,还给出相机轨迹质量、可控性训练步数、最小 batch size 等实战 ablation——是这个方向少见的「能跑起来、可复现、可扩展」的实时交互视频世界模型配方 (github.com/shengshu-ai/minWM) 批判点评:「全栈开源 + 跨两种主流架构(Wan2.1 cross-attn / HY1.5 MMDiT)实例化 + 可适配已有世界模型」三点让它成为这个方向稀缺的工程基建,对想做实时交互视频的团队意义重大。但框架 / recipe 类工作的核心价值在工程完整度而非单点创新;Causal Forcing++ 与非对称 DMD 联训的稳定性、长 rollout 的累积漂移控制还可以披露更多 2. NAVA:原生音视频对齐联合生成6.3B Native Audio-Visual Alignment for Generation | 百度 ERNIE | arXiv:2605.30073 关键词:音视频联合生成·原生对齐·MMDiT·音色可控·百度 前序问题:联合音视频生成要做到时序同步 + 语义连贯,但现有开源方案要么走「双塔 + 后验对齐」(弱化细粒度音视频协同演化),要么走「三模态全统一」(把语义条件和底层同步耦死在一起)——两条路线都有结构性缺陷 本文贡献:NAVA:context-conditioned 的原生音视频对齐框架。先在专用交互空间建立音视频对应关系,再用外部 context 条件化联合去噪。用 Align-then-Fuse MMDiT 架构实例化,从「模态感知的音视频对齐」平滑过渡到「模态共享的联合去噪」;并提出 Timbre-in-Context Conditioning,把参考音色线索关联到对应语音片段,实现可控语音音色 实验效果:在 Verse-Bench 和 Seed-TTS 上配合用户研究表明:仅用 6.3B 参数即取得更优视频质量、精确的音视频同步、有竞争力的音频质量,以及更强的参考音色可控性 批判点评:「先对齐后融合」而非「一上来全统一」的设计直击双塔 / 三模态两条路线的痛点,6.3B 拿下多项指标性价比很高;Timbre-in-Context 把音色可控做进 context 是干净的设计。但「专用交互空间 + 联合去噪」的两阶段是否引入额外训练复杂度、对更长音视频的扩展性仍需观察 3. Gamma-World:多智能体生成式世界模型 Gamma-World: Generative Multi-Agent World Modeling Beyond Two Players | NVIDIA, 清华大学 | arXiv:2605.28816 关键词:多智能体·世界模型·RoPE·稀疏注意力·NVIDIA 前序问题:交互式视频世界模型大多聚焦单 agent(从单一控制信号生成未来观测),但很多生成环境需要多 agent 同时在共享空间行动(多玩家 / 机器人 / 具身体)。扩到多 agent 需要原则性设计:各 agent 独立可控、排列对称、推理高效,同时跨时间和视角保持一致 本文贡献:生成式多智能体世界模型。提出 Simplex Rotary Agent Encoding:3D RoPE 的无参扩展,把 agent 表示成旋转角空间里正单纯形的顶点,给每个 agent 不同相位又保持排列等价——无需学习 per-slot 身份或固定排序即可扩展 agent 身份;提出 Sparse Hub Attention:用可学习 hub token 中介跨 agent 交互,把跨 agent 注意力从二次降到线性。再把全上下文扩散 teacher 蒸成因果 student,带 KV cache 顺序生成时间块,实现 24FPS 的动作响应生成 实验效果:多人虚拟环境实验中,在视频保真度、动作可控性、agent 间一致性上超越 slot-based 和 dense-attention 基线,且无需额外训练即可从 2 玩家泛化到 4 玩家 批判点评:「用正单纯形顶点的旋转相位编码 agent 身份」是极优雅的无参设计——天然排列对称又可扩展;Sparse Hub Attention 把多 agent 注意力线性化是务实工程;从 2 人零样本泛化到 4 人很有说服力。但 hub token 数量与 agent 数的可扩展上限、长时序多 agent 一致性的退化曲线需要更大规模验证 4. AdaState:流式视频生成自演化锚点 AdaState: Self-Evolving Anchors for Streaming Video Generation | 弗吉尼亚理工 Virginia Tech | arXiv:2605.30349 关键词:流式视频生成·自回归扩散·自演化锚点·KV cache·时间相对 前序问题:自回归视频扩散逐块生成、每块条件于已生成内容,但模型结构性地「锚定在第一帧」:首帧 KV 占据注意力 cache 的特权位置、作为整段主场景参考。作为最干净无误差的位置,这个锚点吸走过多注意力,压制视频动态、把场景构图锁死在初始视角,结果是「时间上很浅」的视频——运动、镜头、场景推进都被静态一致性压制 本文贡献:用「自适应 state」替换静态锚点——一个隐 latent,模型每块和内容一起去噪但从不渲染。模型不再参考冻结的首帧,而是每步通过同时关注「前一 state + 当前内容」自己生成场景锚点,产出随生成内容演化的参考。不同于编码绝对时间的标准视频生成,本方法把时间当相对量:每个生成步看到相同的位置结构、state transition 每块都相同。这给生成过程引入了递归——去噪即 transition 函数,KV cache 即载体,无需任何外部模块 实验效果:实验表明自适应 state 大幅改善视频动态,让生成视频内出现更丰富的运动和更自然的场景推进 批判点评:「首帧 KV 锚点偷走注意力 → 视频时间上变浅」的诊断非常精准,用「可去噪但不渲染的隐 state」做自演化锚点是优雅的零外部模块方案,把时间从绝对改成相对的视角很有启发。但「丰富运动」与「时序一致性」本就是 trade-off,自演化锚点会不会牺牲长程一致性需要定量;缺与显式 memory / anchor 方法的正面对比 5. YoCausal:视频生成因果性认知基准 YoCausal: How Far is Video Generation from World Model? A Causality Perspective | 上海 AI Lab, 阳明交大 NYCU | arXiv:2605.30346 关键词:视频生成·世界模型·因果性·评测基准·上海AILab 前序问题:视频扩散模型(VDM)正走向世界模型,关键问题是:它们真懂因果,还是只过拟合统计时序模式?现有基准大多依赖合成数据,受 sim-to-real gap 限制真实世界泛化 本文贡献:YoCausal:受认知科学「违反预期(VoE)」范式启发的两级基准。零成本地把真实世界视频时序反转,作为天然反事实样本,建立可任意扩展的评测协议。Level 1 提出 Reverse Surprise Index (RSI),用去噪 loss 量化「时间箭头」感知;Level 2 提出 Causality Cognition Index (CCI),用 VLM 把数据分层成因果 / 非因果子集,把真正的因果推理从时序偏置中解耦 实验效果:评测 13 个 SOTA VDM 发现:感知到时间箭头并不意味着理解因果,且相对人类级因果认知仍存在显著差距 批判点评:「时序反转真实视频做零成本反事实」是极聪明的基准构造,RSI / CCI 两级指标把「时间感知」与「因果认知」分层解耦的思路很清晰,给「视频生成→世界模型」泼了必要的冷水。但用去噪 loss 衡量「惊讶度」是否完全等价于因果理解仍可争议;VLM 分层本身的可靠性会传导到 CCI 的结论 6. GenClaw:代码驱动的智能体图像生成 GenClaw: Code-Driven Agentic Image Generation | 中山大学 | arXiv:2605.30248 关键词:图像生成·智能体·代码驱动·可控生成·中山大学 前序问题:图像生成已从「文本条件像素合成」走向「具备视觉理解 + 工具调用的多模态 agent」,但现有 agent 仍受制于底层黑盒图像模型——工作流困在「为优化生成反复改 prompt」的循环里,没有直接操控画布的机制。LLM 作为精确视觉构建「画笔」的潜力基本未被开发 本文贡献:GenClaw:代码驱动的智能体图像生成范式,让 agent 像人类艺术家一样创作——先构思、再起草、最后上色。agent 先通过搜索和推理构建概念知识与上下文;再用代码(SVG / HTML / Three.js)渲染可执行的视觉草图;最后用图像生成模型补充纹理、材质、真实感。代码在此作为可控的中间画布,桥接语言推理与像素合成,把程序逻辑与生成模型的视觉表现力无缝整合 实验效果:把图像生成从黑盒范式转成类似真实人类创作的分阶段过程,朝着高度可控、可解释的视觉生成系统迈出一步 批判点评:「代码作中间画布」是把可控性问题转译成「可执行草图」的聪明思路——SVG / HTML / Three.js 草图天然结构化、可精确编辑,比反复改 prompt 强太多;构思-起草-上色的拟人流程也很有叙事性。但代码草图能表达的视觉复杂度有上限(精细写实场景难用 SVG 起草),最终仍依赖底层生成模型的「上色」能力;端到端延迟和失败率需要量化 7. GPIC:28万亿像素许可级图像语料 GPIC: A Giant Permissive Image Corpus for Visual Generation | 斯坦福 李飞飞团队 | arXiv:2605.30341 关键词:图像语料·视觉生成·许可数据集·flow matching·斯坦福 前序问题:研究可扩展的视觉生成方法需要大、可获取、稳定的数据集,但开放且许可清晰的大规模图像语料长期稀缺 本文贡献:GPIC:约 28 万亿像素的巨型许可图像语料。由 SOTA 视觉语言模型为多样互联网图像生成 caption,含 1 亿训练 + 20 万验证 + 100 万测试样本。所有图像均「研究 + 商用」许可宽松,经安全过滤、去重,集中托管于 Hugging Face。提供生成建模的 benchmark 协议,并给出像素空间 flow matching 的参考 baseline 实验效果:数据集、benchmark、模型全部开放(stanford-vision-lab/gpic);为视觉生成提供「大规模 + 许可清晰 + 稳定可复现」的公共底座 批判点评:「许可宽松 + 商用可用 + 安全去重 + 集中托管」直击当前生成数据集的版权 / 可复现痛点——这种基础设施工作对整个社区的长尾价值很高,28 万亿像素 + 完整 benchmark + baseline 让它即插即用。但「VLM 自动 caption」的质量上限会限制可训出的文本对齐能力;与 LAION 类已有大语料的去重重叠和质量差异需要更透明 8. Parametric Memory Law:LoRA参数记忆的幂律定律 How LoRA Remembers? A Parametric Memory Law for LLM Finetuning | 浙江大学, 阿里 | arXiv:2605.30260 关键词:LoRA·参数记忆·幂律·LLM微调·浙大 前序问题:LLM 需持续学习更新知识,LoRA 被广泛用于记忆更新,但现有研究多靠定性下游评测,对「精确参数记忆」的定量容量极限和底层动力学几乎没探索 本文贡献:用 LoRA 作为受控的记忆容量探针,在 latent 空间系统量化精确参数记忆。提出 Parametric Memory Law:把 loss 下降 ΔL 与有效参数量、序列长度联系起来的稳健幂律。token 级细粒度分析揭示确定性相变——证明预测概率 p>0.5 是 greedy decoding 下逐字召回的充分条件。据此提出 MemFT:阈值引导的优化策略,把训练预算动态重分配到次阈值 token 实验效果:实证表明 MemFT 能提升记忆保真度和效率;为「LoRA 到底记住多少、怎么记」给出可量化的定律而非定性结论 (github.com/zjunlp/ParametricMemoryLaw) 批判点评:「用 LoRA 当记忆容量探针 + 找出幂律 + p>0.5 相变的充分条件」是把模糊的「记忆能力」做成可量化科学定律的扎实工作,MemFT 把定律反哺成实际训练策略形成漂亮闭环。但幂律的普适性需要跨更多模型规模 / 任务验证;「逐字召回」的记忆与「泛化知识」的记忆是两回事,定律对后者的适用边界要谨慎 趋势观察 视频生成正在「世界模型化」:从出片段走向实时交互、多智能体、可因果 — minWM 把双向 T2V/TI2V 蒸成相机可控的少步自回归世界模型并全栈开源;Gamma-World 用单纯形旋转编码 + 稀疏 hub 注意力把世界模型从单 agent 扩到多 agent(2→4 人零样本泛化、24FPS);YoCausal 用时序反转真实视频做反事实基准,量出 13 个 SOTA VDM 距离「真懂因果」仍有显著差距——视频生成的下一站从「画面好」转向「能交互、有因果、多主体」 自回归流式视频生成开始解决「时间太浅」的结构病 — AdaState 诊断出首帧 KV 锚点偷走注意力、把场景锁死在初始视角,改用「可去噪但不渲染的自演化隐 state」做相对时间锚点,显著改善运动和场景推进——流式视频生成从「保一致」转向「敢动起来」 音视频联合生成走向「先对齐后融合」的原生范式 — NAVA 指出双塔后验对齐弱化协同、三模态全统一耦合语义与同步两条路都有缺陷,提出 Align-then-Fuse MMDiT 先在交互空间建音视频对应、再 context 条件化联合去噪,6.3B 拿下多项 SOTA + 可控音色——音视频生成的架构共识正在形成 图像生成的可控性升级:代码做中间画布、许可数据做底座 — GenClaw 用 SVG/HTML/Three.js 可执行草图作中间画布,把「反复改 prompt」换成「构思-起草-上色」的拟人可控流程;GPIC 放出 28 万亿像素、研究+商用许可宽松、安全去重的图像语料 + benchmark + flow matching baseline——可控生成的「方法」和「数据底座」被同时推进 大模型记忆与微调走向「可量化定律」 — How LoRA Remembers 用 LoRA 当记忆探针,给出 loss 下降 ΔL 与有效参数 / 序列长度的 Parametric Memory Law,发现 p>0.5 是逐字召回的充分条件,并据此提出阈值引导的 MemFT——把「LoRA 记多少」从定性评测推到可解析的幂律 人工智能炼丹君 整理 | 2026-05-29 更多 AIGC 论文解读,关注微信公众号「人工智能炼丹君」 每日更新 · 论文精选 · 深度解读 · 技术脉络 微信搜索 人工智能炼丹君 或扫描下方二维码关注
-
AIGC 每日速读|2026-05-28|北大OSP-Next视频生成跨硬件加速 今日 AIGC 论文速览 今日共 11 篇 · 视频生成全栈加速 4 篇 · 视频生成新能力 2 篇 · 音频统一生成 2 篇 · 语音合成与编辑 2 篇 · 扩散模型对齐 1 篇 重点论文标题列表 OSP-Next:稀疏+量化+RL全栈视频生成1.64x PARE:视频DiT结构剪枝+动态路由 ⚡ Quantized Keys Steal Attention:KV缓存量化的Jensen偏差校正 SVDQuant-GPTQ:W4A4量化Wan2.2-I2V省内存59.3% Dasheng AudioGen:首个文生混合音频场景统一模型 今日论文速览 1. OSP-Next:稀疏+量化+RL全栈视频生成1.64x OSP-Next: Efficient High-Quality Video Generation with Sparse Sequence Parallelism, HiF8 Quantization, and Reinforcement Learning | 北大袁粒组, 华为 | arXiv:2605.28691 关键词:视频生成·稀疏注意力·序列并行·HiF8·北大袁粒组 ⚠️ 前序问题:Diffusion Transformer 在视频生成上已经能出好东西,但 full attention 二次开销死死压住效率。前人方案各做一段(稀疏 / 量化 / 蒸馏),缺一套能同时打通通信、计算、精度的端到端方案——尤其在「多卡序列并行」上和「跨国产硬件」上 本文贡献:OSP-Next:把稀疏注意力 + 序列并行 + 量化 + RL 后训练全栈打通的高效 T2V 框架。Skiparse-2D Attention 在空间维做 token-wise + group-wise 稀疏并保留 FlashAttention 兼容;提出 Sparse Sequence Parallelism (SSP) 用一次 All-to-All 切换稀疏模式,相比 Ulysses SP 通信量降低 75%;HiF8 量化支持 8-bit 联合训练 + 稀疏 fine-tune;Mix-GRPO 后训练弥补稀疏模型的质量回退 实验效果:VBench 总分 83.73% 超越 Wan2.1 基线;5 秒 720P/768P 设置下,H200 单 GPU 加速 1.64×,8 GPU 加速 1.52×;OSP-Next-HiF8 仅掉 0.4% 分数即可在国产昇腾 Ascend 950PR 上拿到 1.69× 和 2.27× 加速——是少见的同时验证国际/国产硬件的视频生成加速方案 批判点评:「稀疏注意力 + 序列并行 + 量化 + RL」四件套全栈打通,每一件单独不算新,但 SSP 把通信量直接打掉 75% 是非常硬的工程数字;跨 H200 + 昇腾的双硬件验证为国产硬件视频生成提供了稀缺的实证。但 Skiparse-2D 是 fixed pattern,对极复杂运动场景的可适配性需要看;Mix-GRPO 与 SSP 联训的稳定性细节披露还可以更多 2. PARE:视频DiT结构剪枝+动态路由 PARE: Pruning and Adaptive Routing for Efficient Video Generation | 港中文 CUHK, 上海 AI Lab, 悉尼大学 | arXiv:2605.27336 关键词:视频 DiT·结构剪枝·动态路由·Wan2.1-14B·上海 AI Lab ⚠️ 前序问题:Video DiT 又宽(block 宽)又深(架构深)又要多步采样,部署成本极高。前人通过压宽/压深/压步数减成本,但都 commit 到固定架构——不能针对单个输入或不同去噪阶段动态调整 本文贡献:PARE:把宽度剪枝和深度自适应路由联合做。宽度上观察到 attention head 自然分化为空间 vs 时序角色,设计区分两类的 importance scoring 避免「运动关键的 temporal head」被过早剪掉;深度上训轻量 router 以 denoising timestep + 视觉内容为条件,动态选择每步执行哪些 block——实现「按输入动态计算」而非静态删除。两阶段 progressive pipeline 先用蒸馏修复宽度剪枝的质量损失,再联合优化 student + router 解耦学习目标 实验效果:在 Wan2.1-14B 上对 I2V 和 T2V 都大幅降低每步算力且保住 VBench 各维度质量;与 step 蒸馏天然可组合进一步加速——把「静态剪枝」时代翻篇成「动态路由按需算」 批判点评:「区分空间/时序 head 重要性 + denoising-step 条件的 block router」两个洞察都直击 Video DiT 的结构性冗余。动态路由实现「按输入按 timestep 算」是 efficient video gen 的下一阶段方向。但 router 本身的训练稳定性、推理时的额外 overhead、以及与 OSP-Next 类静态稀疏组合后的边际收益需要更细 ablation 3. Quantized Keys Steal Attention:KV缓存量化的Jensen偏差校正 Quantized Keys Steal Attention: Bias Correction for KV-Cache Compression in Video Diffusion | 慕尼黑工大 TUM, Tensordyne | arXiv:2605.26266 关键词:视频扩散·KV cache·INT2 量化·Jensen 偏差·长视频 ⚠️ 前序问题:chunk-wise 自回归视频扩散依赖前序 chunk 的 KV cache 避免重复计算,但视频越长 cache 越大,量化 KV 到低 bit 又会显著掉画质。掉画质的根因是什么?以前没人说清楚 本文贡献:首次明确指出根因:softmax 注意力中 exp 的凸性让量化噪声系统性放大「被 cache 的 keys」对注意力的贡献——作者命名为 Jensen bias(量化的 keys 会偷走当前 chunk 的注意力质量)。给出 per-attention-score 的解析修正项,在 expectation 上消除该 bias,只用量化 step size 和 query norm 即可在线算;用二阶 Taylor 近似让额外计算开销可忽略、无需额外显存 实验效果:在 MAGI-1 / SkyReels-V2 / HY-WorldPlay 三个长视频模型上 INT2 量化即可恢复大部分掉的质量、接近 BF16;用 50% 更少显存的 INT2 反而能超过 INT4——长视频 KV cache 压缩拿到新的帕累托前沿 批判点评:把「量化掉画质」从经验问题改写成「Jensen 偏差」这一可解析的统计现象是真正的科学贡献——一行公式校正、零额外显存就拿到 INT2 ≈ BF16 的质量。这种「找根因 + 闭式解」的工作含金量高。但局限在 chunk-wise AR 视频扩散,对非 AR 的全局扩散 KV 压缩不直接适用;与 SmoothQuant 等激活/权重路线的组合策略还可探索 4. SVDQuant-GPTQ:W4A4量化Wan2.2-I2V省内存59.3% Timestep-Aware SVDQuant-GPTQ for W4A4 Quantization of Wan2.2-I2V | 华中科技大学 HUST | arXiv:2605.27003 关键词:W4A4 量化·Wan2.2·MoE DiT·SVDQuant·华中科大 ⚠️ 前序问题:把大型视频 DiT 推到 W4A4 量化可以省一大块显存,但两道坎卡死:(1) 稀疏的「大幅激活 outlier」;(2) 不同去噪 timestep 的激活分布漂移很大。这两个问题在 Wan2.2-I2V 双专家 MoE DiT(高噪/低噪两个 expert 量化敏感度完全不同)下被进一步放大——单一全局校准策略根本拿不下 本文贡献:Timestep-Aware SVDQuant-GPTQ:(1) SVDQuant-based 低秩 outlier 补偿处理激活大幅 outlier;(2) GPTQ 重建感知残差权重量化;(3) timestep-bin-wise 逐层激活 clipping-ratio 搜索,对每个 MoE expert 独立完成。三件套合起来就是「按 expert + 按 timestep」精细化校准的 PTQ 框架 实验效果:在 OpenS2V-Eval 上相对 BF16 把峰值 GPU 内存降 59.3%,VBench 平均分仅掉 0.9%,Imaging Quality 仅掉 2.3%——证明「expert + timestep 双感知校准」是 MoE 视频 DiT 量化高保真的必要条件 批判点评:把 MoE DiT 量化从「全局校准」拉到「按 expert + 按 timestep」是正确的颗粒度切分——双专家的量化敏感度本来就不同,强行全局必然掉点。59.3% 内存降 + <1% 质量损是漂亮的工业数字。但 PTQ 路线天然依赖 calibration set 质量,长视频/复杂运动的覆盖度需要追踪;与昨天 RT-Lynx 类激活稀疏的组合潜力值得探索 5. Dasheng AudioGen:首个文生混合音频场景统一模型 Dasheng AudioGen: A Unified Model for Generating Coherent Audio Scenes from Text | 小米, 上海交大 | arXiv:2605.27838 关键词:音频场景生成·multi-view caption·flow matching·小米·DiT ⚠️ 前序问题:音频生成长期被「按域切分」——语音、音乐、音效各有独立模型——做不到从一句描述生成「同时包含人声 + 背景音乐 + 环境音效」的连贯混合音频场景。两大障碍:缺真实混合音频的细粒度监督;声学表示难以同时承载多个并发音频组件 本文贡献:Dasheng AudioGen:首个统一生成混合音频场景的端到端框架。两个核心:(i) structured multi-view captions——把复杂声学场景显式解耦成互补的描述视图,让每个音频层都有细粒度控制;(ii) 高维统一「语义-声学」表示作为共享 latent,注入语义先验加速跨模态训练收敛,同时高维特征空间提供解耦并发声音组件的容量。在此基础上一个简单的 flow-matching DiT 就能跑出端到端高质量音频场景生成 实验效果:在混合音频类别接近真实录音质量,单类型生成(speech/music/SFX)也与专用模型打平——首次把「视觉生成里图文统一」的思路真正落到音频场景上;配套建立音频场景生成的综合评测 pipeline 批判点评:「structured multi-view captions + 高维语义-声学统一 latent」是非常对症的两个设计——把音频域的「描述粒度」和「表示容量」都拉到能容纳混合场景的层次。flow-matching DiT 的工程极简性也很好。但 multi-view caption 的自动构造成本/质量、高维 latent 增加的 DiT 训练开销,以及与商用 ElevenLabs Sound Effect / Stable Audio 2 的端到端对比都需要更细评测 6. HarmoVid:视频肖像重打光和谐化稳定不闪烁 HarmoVid: Relightful Video Portrait Harmonization | Adobe Research, UNC | arXiv:2605.28811 关键词:视频肖像·relight 和谐化·deflicker·alpha mask·Adobe ⚠️ 前序问题:把人物前景视频和谐到目标背景场景(同步阴影、色调、光照强度——relightful harmonization)的硬伤是:视频域没法采集「同一动作不同光照」的成对标注数据。最直接的方案——「按帧调用图像和谐模型」——会带来严重时序抖动(flicker) 本文贡献:HarmoVid 给出整套视频和谐化方案:(i) 全新的 lighting deflickering 模型稳定全局和局部光照 flicker,把「逐帧 image-harmonization」的输出升级成可监督的 paired 视频数据;(ii) 视频扩散模型在 deflickered 真实 + 合成视频上学习;(iii) asymmetric alpha mask conditioning 让模型从真实视频里学到干净的边界 实验效果:在时序连贯、自然度、边界干净度、物理合理光照行为多个维度超越此前所有 image-based 和 video-based 和谐化方法;relighting 表现力也保住——人物视频合成 / 后期合成的标准工业链路被显著升级 批判点评:用「先 deflicker 再训练」绕开「无成对数据」的死结是非常聪明的——deflicker 把单帧图像和谐输出转化成可用监督,是真正的杠杆点。asymmetric alpha mask 也很实用。但 deflicker 模型本身的失败模式(强光/复杂阴影)会传导到下游;与 Adobe 自家的商业级合成工具的真实对比需要更细评测 7. SmartDirector:多关键帧条件电影级视频叙事控制 SmartDirector: Keyframe-Conditioned Cinematic Video Generation with Narrative Pacing Control | 国内视频生成团队 | arXiv:2605.27891 关键词:电影级视频·多关键帧·叙事节奏·两阶段·Director-Gen/SR ⚠️ 前序问题:视频的「叙事质量」决定感知价值,但现有视频生成方法主要靠 text prompt 或首尾帧这类稀疏 condition——对叙事结构和时序节奏的精确控制非常有限,导出不了真正「有 pacing 的电影感视频」 本文贡献:SmartDirector:以多关键帧增强视频生成的叙事能力。支持单镜头、多镜头叙事合成、视频延展三类场景。两阶段:(i) Director-Gen 在低分辨率上以关键帧为条件生成;(ii) Director-SR 利用高分辨率关键帧作为语义锚点把细粒度细节补回来。配套数据管线从电影中精选单镜头/多镜头序列以支撑多关键帧训练 实验效果:在多个评测上大幅超越 SOTA,把视频生成从「按 prompt 出 5 秒片段」升级到「按多关键帧出有节奏的多镜头序列」——电影级视频生成的可控性接近真实创作工作流 批判点评:「多关键帧 + 两阶段先粗后细」直击「电影级叙事控制」的实际痛点——单 prompt / 首尾帧确实远远不够。两阶段把分辨率 vs 叙事控制解耦是合理设计。但「关键帧」的获取成本(人工/AI辅助)和叙事节奏的可量化评测仍是模糊地带;多镜头切换的时空一致性细节需要更深 ablation 8. LoSATok:1280维语义压缩到128维统一audio LoSATok: Low-dimensional Semantic-Acoustic Tokenizer for Cross-Domain Audio Understanding and Generation | 清华深圳, 面壁智能 | arXiv:2605.27840 关键词:audio tokenizer·128 维·语义瓶颈·清华深圳·面壁 ⚠️ 前序问题:音频 tokenizer 是统一「音频理解」和「音频生成」的根基。理解需要高层语义;生成需要语义 + 声学细节。现有统一 tokenizer 在高维连续 latent 里同时编码——这增加了 DiT 生成端的建模负担 本文贡献:LoSATok:观察到 1280 维语义 encoder 特征是可压缩的,引入 Semantic Bottleneck 压到 128 维,并用 time-relation loss 保时序特征一致性;再用「双层级语义监督」同时利用高维/低维语义信号——让 tokenizer 在紧凑 latent 空间里同时承载语义和声学细节 实验效果:在 speech / music / 通用 audio 上 SemBo 保住强低维语义容量,LoSATok 与多个语义表示比较 understanding 性能仍有竞争力;在 DiT 端的 speech / music / audio 生成上一致改进——证明「低维 audio 表示也能同时支撑理解与生成」 批判点评:把「audio 统一 tokenizer」的维度从 1280 砍到 128 是非常硬的容量压缩——若真的不掉理解还能提升生成,那就解掉了「audio 统一表示卡 DiT」的关键梗。time-relation loss + 双层级语义监督是合理工程。但 128 维下声学细节的极限(音乐复杂混音、长 reverb)需要更细测试;与 Dasheng AudioGen 高维路线的端到端比较是行业级议题 9. CosyEdit2:GRPO语音编辑反哺零样本TTS CosyEdit2: Speech-Editing-Oriented Reinforcement Learning Unlocks Better Zero-Shot TTS | 南开大学 | arXiv:2605.25930 关键词:语音编辑·GRPO·zero-shot TTS·南开大学·post-training ⚠️ 前序问题:语音编辑和 zero-shot TTS 同源于「prompt 驱动的语音生成」,但语音编辑对「与周围未编辑内容的局部声学一致性」要求严苛得多。SFT 让 TTS 模型获得编辑能力的路线被卡在「成对编辑数据不完美 + 优化信号粗粒度」 本文贡献:CosyEdit2:建立「先 SFT 初始化 → 再 editing-oriented GRPO 后训练」的两阶段框架。GRPO 阶段在「无目标语音」的数据上做,把语音编辑当作 RL 任务优化,让模型从粗粒度匹配走向精细局部声学一致 实验效果:不仅在语音编辑上显著提升,还反哺 zero-shot TTS 能力——揭示「编辑任务 ↔ 合成任务」之间隐藏的相互增益;GRPO 在 audio 域被验证是有效的 post-training 范式 批判点评:把 GRPO 引入 audio 域、并用「编辑反哺合成」这个新角度证明两个任务的深层互助,是非常聪明的科学故事。无目标语音的 RL 设计也比依赖成对数据更可扩展。但 GRPO 的 reward 设计细节、跨语种/多说话人鲁棒性、以及对 prosody 细节的影响需要更系统评测 10. PilotTTS:高德200K小时开源TTS竞品级 PilotTTS: A Disciplined Modular Recipe for Competitive Speech Synthesis | 高德 AMAP | arXiv:2605.27258 关键词:TTS·200K 小时·开源·Q-Former·高德 AMAP ⚠️ 前序问题:SOTA TTS 系统通常需要数百万小时专有数据 + 多阶段复杂架构——这对资源受限的研究团队是几乎跨不过去的门槛。开源社区想自己训出竞品级 TTS 一直缺成熟 recipe 本文贡献:PilotTTS:高德 AMAP 用「最小化架构 + 严格数据工程」做出竞品级轻量自回归 TTS。仅用 200K 小时数据 + 全开源工具处理。两大贡献:(i) 可复现的多阶段数据处理 pipeline(质量评估 + 标签标注 + 过滤);(ii) Q-Former conditioning 紧凑模型架构,通过 cross-sample paired training 解耦说话人身份与说话风格。统一框架支持 zero-shot voice cloning / 11 类情感合成 / 4 类副语言合成 / 14 种中文方言 实验效果:在 Seed-TTS Eval 上 test-en WER 1.50%(最低)、test-zh CER 0.87%;两个测试集说话人相似度都最高(0.862 / 0.815)——超越使用大得多数据集训出来的系统。完整 data pipeline + 预训练权重 + 代码全开源 (AMAPVOICE/PilotTTS) 批判点评:「200K 小时 + 开源工具 + 极简架构」做出超越百万小时专有数据系统的 TTS——是非常有信号量的开源胜利,对中小团队意义重大。Q-Former 解耦说话人/风格的设计也是 clean。但 PilotTTS 主打数据工程而非架构创新,复现门槛仍在「数据处理 pipeline 的工程细节」;与昨天 LongCat-Avatar 类「audio + 视频联合」的下一步集成是开放问题 11. LAIR:扩散模型从成对偏好升级到列表对齐 Beyond Pairwise Preferences: Listwise Reward-Aware Alignment for Diffusion Models | 斯坦福, 加州理工 Caltech | arXiv:2605.26491 关键词:diffusion 对齐·listwise preference·advantage-weighted·Stanford·Ermon ⚠️ 前序问题:preference optimization 已成 RLHF 之外对齐 T2I 扩散的高效替代,但现有方法基本都把监督降到 binary pairwise——这在「同 prompt 有多张候选 + 有连续 reward 分数」时严重浪费信息(一个 winner-loser 标签远远没用上 reward 分布) 本文贡献:Diffusion LAIR:reward-aware listwise preference optimization。每个 prompt 把候选组的 reward 分数转成中心化 advantage 权重,再优化「advantage-weighted regression」目标——目标定义在 implicit reward(当前模型 vs 固定参考模型的 denoising-loss 改进量)上,配二次惩罚正则隐式 reward 幅度。结果是同时用所有候选而非选 pair,并保持保守。LAIR 目标在 implicit-reward 空间有 bounded closed-form 最优解,把正则强度 → 偏好更新幅度的关系写清楚 实验效果:在 SD1.5 / SDXL 上对 T2I 生成 / 组合生成 / 图像编辑 benchmark 都超越 strong pairwise preference optimization baseline;为 diffusion 对齐提供「更接近 RLHF reward 信息密度但不需在线 RL」的中间路线 批判点评:把 DPO 类 pairwise 升级到 listwise + 给出 closed-form 最优解的清晰表述是教科书级的方法工作——既保留 offline 偏好优化的稳定性,又用上了 reward score 的全部信息。但 listwise 数据采集成本高于 pairwise(要 N 张同 prompt 候选 + reward 分),实际落地的数据可得性是隐藏成本;与 in-context 在线 RL(GRPO 类)的端到端比较略浅 趋势观察 视频生成进入「全栈加速」时代:稀疏 + 量化 + 并行 + 路由 + RL 多管齐下 — OSP-Next 把稀疏注意力 + Sparse Sequence Parallelism(通信 -75%)+ HiF8 量化 + Mix-GRPO 一锅端,跨 H200 / 昇腾双硬件分别 1.64× / 2.27× 加速;PARE 联合宽度剪枝 + 动态深度路由,在 Wan2.1-14B 上按输入按 timestep 动态算;SVDQuant-GPTQ 把 Wan2.2 双专家 MoE DiT 推到 W4A4 显存降 59.3%——视频生成的工业部署正在被「全栈加速」改写 长视频 KV cache 压缩出现「找根因 + 闭式解」类突破 — Quantized Keys Steal Attention 首次把「量化 KV 掉画质」从经验现象写成 Jensen bias(exp 凸性放大 cache key 贡献)的可解析统计现象,一行公式校正零额外显存,让 MAGI-1 / SkyReels-V2 / HY-WorldPlay 在 INT2 上接近 BF16——把 chunk-wise AR 长视频的 KV 压缩从「玄学调参」推到「有理论的工程」 音频生成统一化:从「按域切分」走向「一句描述出混合场景」 — Dasheng AudioGen 是首个能从一句描述同时生成 speech + music + SFX 混合连贯场景的统一模型,关键是 structured multi-view captions + 高维语义-声学统一 latent;LoSATok 反过来把 1280 维语义压到 128 维统一 tokenizer 反哺 DiT 生成;CosyEdit2 在 audio 域用 GRPO 把「编辑」反哺「TTS」——audio 正在重走视觉「统一模型」的同一条路 视频生成的「叙事控制」与「视频后期」继续拓宽到工业链路 — SmartDirector 把视频生成从「按 prompt 出 5 秒片段」升级到「多关键帧 + 两阶段先粗后细」做电影级叙事节奏控制;HarmoVid 用 deflicker 模型破解「视频和谐化无成对数据」的死结,把视频肖像 relight 和谐化做到工业级稳定——视频生成的可控性从「内容」深入到「节奏」和「后期合成」 开源 TTS / 对齐方法补齐 audio + diffusion 的「最后一公里」 — 高德 PilotTTS 用 200K 小时 + 开源工具 + Q-Former 极简架构做出超越百万小时专有系统的开源 TTS(Seed-TTS Eval 第一);Diffusion LAIR 把 T2I 对齐从 pairwise 升级到 listwise,给出 implicit-reward 的 closed-form 最优解——开源社区在 audio 合成 + diffusion 对齐这两个长期被闭源霸占的方向同时迈出了「竞品级 + 理论级」的双台阶 人工智能炼丹君 整理 | 2026-05-28
-
AIGC 每日速读|2026-05-27|美团LongCat-Avatar 1.5开源逼近闭源数… 今日 AIGC 论文速览 今日共 7 篇 · 工业级数字人开源对标闭源 1 篇 · 音视频联合生成评测体系 1 篇 · 视觉生成新范式:层级与通道级 2 篇 · DiT 推理加速与可控编辑 2 篇 · 原生多模态架构路线图 1 篇 重点论文标题列表 LongCat-Video-Avatar 1.5:美团数字人开源对标HeyGen LongAV-Compass:首个分钟级音视频生成评测基准 MRT:20B多层透明图像生成超Qwen CVQ:通道级VQ取代patch挑战传统 RT-Lynx:激活稀疏化让DiT GEMM加速1.55x 今日论文速览 1. LongCat-Video-Avatar 1.5:美团数字人开源对标HeyGen LongCat-Video-Avatar 1.5 Technical Report | 美团 LongCat Team | arXiv:2605.26486 关键词:数字人·美团 LongCat·8 NFE 蒸馏·RLHF·开源对标闭源 前序问题:音频驱动视频生成虽然进展飞快,但要做到「商业级稳定性」仍然难——商用场景下需要的不仅是「唇形对得上」,还要全身时序稳定、长视频身份不漂、多人交互/物体交互不崩,并且部署侧推理 budget 严苛 本文贡献:美团 LongCat-Video-Avatar 1.5:以「系统工程 + 生产就绪」而非架构创新为优先项的开源数字人框架。把 audio encoder 升级到 Whisper Large 并精修训练 recipe,做到准确唇形同步 + 全身时序稳定 + 长视频严格身份一致;通过严格数据清洗 + RLHF 训练,泛化到动漫/动物等风格化域,并原生处理多人交互和物体处理这类真实复杂场景;为工业部署引入 advanced step distillation 把推理压到 8 NFE 实验效果:在 500+ 多样测例 benchmark 上的定量指标 + 严格人评显示 v1.5 在 human-likeness 和专家级质量评估上与 HeyGen / OmniHuman 1.5 / Kling Avatar 2.0 等闭源系统打平甚至超越;开源发布拉近了「学术原型」与「商业级部署」的差距 批判点评:美团摆明用「工程优先」的姿态——Whisper Large + 严苛数据 + RLHF + 8 NFE 蒸馏这套组合拳是教科书级的工业打法,公开报告稀缺。但「commercial-grade」更多靠数据规模和清洗,单一架构 trick 不构成壁垒;对标 HeyGen / OmniHuman 1.5 的具体维度需要更详细的 ablation 才能说服业界,且 8 NFE 与 Kling Avatar 2.0 之间的真实人评差距值得追踪 2. LongAV-Compass:首个分钟级音视频生成评测基准 LongAV-Compass: Towards Unified Evaluation of Minute-Scale Audio-Visual Generation Across T2AV, I2AV, and V2AV | 北京大学, Kling, 南大, 上交, 港科广州, 上海 AI Lab | arXiv:2605.26244 关键词:音视频生成·minute-scale·评测基准·T2AV/I2AV/V2AV·北大 前序问题:音视频联合生成正在从「短片段」走向「分钟级长内容」,但现有评测协议几乎都还停留在 5-10 秒文本条件生成;很少支持文本/图像/视频三种条件统一评测,更没说清楚长时间下身份一致性、叙事连贯、音画对齐到底怎么退化 本文贡献:LongAV-Compass:首个面向 minute-long 音视频生成的系统化评测基准。284 个精选测例覆盖 T2AV / I2AV / V2AV 三种输入,按应用场景和生成复杂度组织;统一评测框架结合 MLLM 辅助评估和 DINO-v2 / ArcFace / CLIP / ImageBind 等感知指标,覆盖 20+ 细粒度维度——段内质量、跨段一致性、全局叙事连贯、语义对齐、音画同步全都评 实验效果:在 11 个代表性模型上跑 + 人对齐验证,把当前系统在「保持连贯、保持语义对齐、保持时序一致」上的瓶颈量化呈现;为分钟级音视频生成提供了首个诊断式 testbed——音视频联合生成的「评测短板」正式被补上 批判点评:把音视频联合生成的评测从 5-10s 短片推到分钟级是必要补位——评测落后一直是这个赛道的隐形天花板。20+ 细粒度维度 + MLLM 辅助 + 4 大经典感知模型组合非常综合。但 MLLM 评测本身的偏置是隐忧,DINO-v2/ArcFace/CLIP/ImageBind 的权重融合策略需要更多 ablation;分钟级测例 284 个对开源社区评测可行但工业级评测仍偏小 3. MRT:20B多层透明图像生成超Qwen MRT: Masked Region Transformer for Layered Image Generation and Editing at Scale | 微软亚研 MSRA | arXiv:2605.27235 关键词:多层图像生成·20B·masked region·8 步实时·MSRA 前序问题:层级图像生成与编辑是图像生成走向「可复用 / 可重编辑 / 可组合」的关键能力——类比自然语言里的「逐词编辑」——但在大规模上一直是 underexplored 的空白。多层透明生成 + 多任务统一框架既缺数据也缺方法 本文贡献:MRT:20B 参数 masked region diffusion 模型,专为多层透明图像生成与编辑打造,在 10M+ 多语言设计样本上训练,支持多 aspect ratio 与多语言 prompt。两项核心贡献:(i) 把 text-to-layers / image-to-layers / layers-to-layers 三任务统一到「共享 masked region diffusion」框架,靠 selective token masking 灵活切换层级生成与编辑;(ii) overflow-aware canvas layer 处理边界 inconsistency 并支持半透明背景合成,做出可编辑且延伸至画布外的完整图层。配套 diffusion 蒸馏实现 8 步实时多层生成 实验效果:在三项任务上全面超越此前 SOTA 包括商业系统;user-study 显著优于同期 Qwen-Image-Layered 的 image-to-layers 质量,且推理快 10-100×,activation GPU 显存降低 50-90%——为多层透明图像生成立下新基准 批判点评:把多层图像生成做到 20B + 三任务统一 + 8 步实时是非常工业化的工作量;超越 Qwen-Image-Layered 的人评结果是强信号。但 10M+ 设计样本的语义/版权分布未明,多语言/多 ratio 的真实可控性需要更细 ablation;overflow-aware canvas layer 在极端 aspect ratio 下的稳定性也需要追踪 4. CVQ:通道级VQ取代patch挑战传统 Channel-wise Vector Quantization | 上海创新研究院, 西湖大学, 浙大, 复旦 | arXiv:2605.26089 关键词:视觉 tokenization·channel-wise VQ·CAR·next-channel·DPG 86.7 前序问题:传统视觉自回归(VAR)和 VQ-based 文生图都把图像分成 patch、给每个 patch 分配一个离散 token——但这种 patch 视角本质是「把图像当空间网格」,不太符合人类绘画「先勾结构再补细节」的层次过程。codebook 利用率上不去、增大 codebook 后 collapse 也是顽疾 本文贡献:Channel-wise Vector Quantization (CVQ):新视觉 tokenization 范式,离散化对象从 patch 换到 feature map 的每一个 channel——一张图被表示为「不同层级视觉细节的离散等级」而不是「空间 patch 网格」。基于 CVQ 提出 Channel-wise Autoregressive (CAR):next-channel prediction 替代 next-patch prediction,先勾全局结构再渐进精修细粒度属性 实验效果:CVQ 在 16K+ codebook 规模下实现 100% codebook 利用率(无任何 trick),重建质量显著超过传统 VQ;CAR 在文生图上拿到 DPG 86.7 / GenEval 0.79——证明「按 channel 分层渲染」是 patch-based 视觉自回归的现实替代品 批判点评:把 tokenization 从空间 patch 切换到 channel 维度是真正的范式 rethink——「先结构后细节」也与人类作画过程契合。100% codebook 利用率是很硬的数字。但 channel 抽象层次的物理含义不够清晰(哪个 channel 对应「结构」哪个对应「细节」依赖训练涌现),跨分辨率/跨模态时的稳定性需要进一步验证;与 latest DiT 路线的端到端比较略浅 5. RT-Lynx:激活稀疏化让DiT GEMM加速1.55x RT-Lynx: Putting the GEMM Sparsity In a Right Way for Diffusion Models | 国内系统研究团队 | arXiv:2605.26632 关键词:DiT 加速·激活稀疏化·N:M sparsity·CUDA kernel·1.55x 前序问题:DiT 推理太贵——量化和蒸馏已经被深挖,但能砍掉将近一半 FLOPs 的「半结构化稀疏(N:M sparsity)」一直 underexplored。原因是大家都在做 weight 稀疏化,但对 weight 做 50% 剪枝会拿掉关键模型容量,让生成质量崩坏 本文贡献:RT-Lynx:核心 insight 是「DiT 的激活本身天然稀疏,比 weight 更适合 N:M 半结构化稀疏化」。提出 paradigm shift——从 weight sparsification 转到 activation sparsification;配 error-compensation 缓解精度损失;并实现针对该场景高度优化的 CUDA kernel 实验效果:线性层平均 1.55× speedup,多个扩散模型上保留原生生成质量同时显著加速;为 DiT 部署提供「除量化和蒸馏外的第三条加速路线」 批判点评:把「稀疏化目标」从 weight 切到 activation 是非常对的洞察——activation 在 inference 时本来就动态出现 zero,强制 N:M 模式损失更小。1.55× 加速 + 不掉质量在 DiT 推理优化里属于实打实的硬增量。但 N:M 模式需要硬件配合(Ampere/Hopper 的 sparse tensor core),消费级 GPU 上的实际收益要打折;激活稀疏化对极长 token 序列(高分辨率视频)下的可扩展性需评测 6. ControlLight:Flow Matching做连续强度可控低光增强 ControlLight: Towards Controllable, Consistent, and Generalizable Low-Light Enhancement | 中科院深圳, StepFun | arXiv:2605.25569 关键词:低光增强·flow matching·连续可控·一致性·中科院深圳 前序问题:现有深度学习低光增强方法都在「有限数据集 + 单一增强目标」上训练——既泛化差又不可控。真实场景里同一张暗图,不同用户/不同场景需要不同的增强强度,但现有方法把它当作一个固定函数 fit 本文贡献:ControlLight:「可控 + 一致 + 可泛化」的低光增强框架。先建大规模真实退化图像数据集,对每张图给出「连续光照强度」标签作为监督;引入 misalignment-aware weighted flow matching loss,让模型在不同控制强度下输出仍然保持图像结构一致——用户可以连续滑动「增强强度」拿到不同结果而不撕裂 实验效果:在多个 benchmark 上超过现有低光增强 SOTA,同时具备「连续强度可控」+ 「真实场景泛化」能力,把低光增强从「一锤子函数」改造成「可调节工具」 批判点评:把 flow matching 用到低光增强 + 连续条件标签 + misalignment-aware loss 三件套是非常 clean 的设计——其中「misalignment-aware」直接 attack 不同强度下结构一致的根因。但「连续光照强度标签」如何从真实退化数据获取本身是个隐藏难题;与最近基于 diffusion 的图像 restoration 在极端低光场景的比较需要更全面 7. Native MM Roadmap:原生多模态架构路线图三分类 Toward Native Multimodal Modeling: A Roadmap | 华威大学, Monash, 港理工, 腾讯优图 | arXiv:2605.25343 关键词:原生多模态·NMM·路线图·three-class taxonomy·腾讯优图 前序问题:多模态建模正在从 modality-agnostic 推理走向 world modeling。早期 late-fusion(拼 encoder + frozen LLM + 输出头)已显疲态,最近转向 Native Multimodal Modeling (NMM)——把各模态从根上集成进同一个 transformer 拿到更强性能。但 NMM 的设计空间目前仍未系统化 本文贡献:为社区提供形式化的 NMM 路线图:(1) 形式化定义「架构原生性」,区分 mid-fusion / early-fusion 与非原生范式;(2) 从「输入-输出对偶」角度把现有 native 模型组织成三类——Multi-to-Text(跨模态理解,纯文本输出)/ Multi-to-Target(场景化生成,如图像/音频/视频生成)/ Multi-to-Multi(对称输入输出的统一建模);(3) 全栈式工业视角剖析从架构协调、海量数据 curation、训练 recipe 到推理部署和评测的端到端 pipeline 实验效果:把当前散乱的「统一多模态架构」研究归结成一份可被工程师和研究员同时参考的路线图——理解和生成在「统一 transformer 范式」下无缝共存是 NMM 的目标终态。对走向 GPT-4o / Gemini 1.5 级原生多模态的开源工作给出系统化方法学 批判点评:「形式化 architectural nativity + 输入输出对偶三分类 + 全栈工业视角」三个层次组织得很清晰——是社区急需的概念清理。但综述类天然有「分类强、实证少」的局限,三类边界(特别是 Multi-to-Target 和 Multi-to-Multi)在最新模型上可能交叉;对未来 1-2 年具体技术抉择的指导力度需要在落地 case 中验证 趋势观察 工业级开源数字人 / 视觉基础模型加速对标闭源 — 美团 LongCat-Video-Avatar 1.5 用 Whisper Large + RLHF + 8 NFE 蒸馏的工业打法,在 500+ 测例上与 HeyGen / OmniHuman 1.5 / Kling Avatar 2.0 等闭源系统打平甚至超越——昨天百度 ERNIE-Image 是文生图,今天美团 LongCat-Avatar 是数字人——国内大厂正在多个垂类同时按下「开源对标闭源」按钮 音视频联合生成评测从「短片」推到「分钟级」 — LongAV-Compass 提供首个 minute-scale 音视频生成评测基准——284 个测例覆盖 T2AV / I2AV / V2AV、20+ 细粒度维度(段内质量 + 跨段一致 + 全局叙事 + 语义对齐 + 音画同步)。和最近 Baton / SpongeBob / StreamChar 等音视频联合生成模型一起,把「短片评测」时代正式翻篇 视觉生成 tokenization / 架构范式正在被 rethink — MRT 把「图像生成」从单层 RGB 推到「多层透明 + 三任务统一 + 8 步实时」;CVQ 把视觉 tokenization 从 patch-wise 切换到 channel-wise,重提「先结构后细节」的人类作画过程并拿到 100% codebook 利用率与 GenEval 0.79——patch + 单层这两个长期假设都在被挑战 DiT 推理加速的第三条路:从「weight 稀疏」转向「activation 稀疏」 — RT-Lynx 指出 DiT 激活本身就稀疏,对 N:M 半结构化稀疏化远比 weight 鲁棒,配合错误补偿和定制 CUDA kernel 拿到 1.55× 线性层加速且不掉质量——量化、蒸馏之外,「激活稀疏化」正式成为 DiT 部署的第三条加速路线 Native 多模态架构走向系统化,可控生成成为最后一公里 — Toward Native Multimodal Modeling 把原生多模态架构形式化为「Multi-to-Text / Multi-to-Target / Multi-to-Multi」三分类,给出从架构到训练到部署的全栈 roadmap;ControlLight 用 misalignment-aware flow matching 把低光增强做成「连续强度可控」工具——「统一架构 + 可控生成」正在收敛成下一代生成模型的双轨 人工智能炼丹君 整理 | 2026-05-27 更多 AIGC 论文解读,关注微信公众号「人工智能炼丹君」 每日更新 · 论文精选 · 深度解读 · 技术脉络 微信搜索 人工智能炼丹君 或扫描下方二维码关注
-
AIGC 每日速读|2026-05-26|百度ERNIE-Image开源8B DiT追平闭源 今日 AIGC 论文速览 今日共 11 篇 · 国产开源文生图基础模型 1 篇 · 音视频联合生成与编辑 3 篇 · 视频生成训练范式革新 2 篇 · few-step 蒸馏与自回归视频蒸馏 2 篇 · 推理时自适应与视频编辑 3 篇 重点论文标题列表 ERNIE-Image:百度8B DiT开源逼近闭源SOTA Baton:首引语义蓝图驱动音视频联合生成 ⚡ SpongeBob:首个端到端音视频联合编辑Sync+30% StreamChar:长时流式角色音视频实时生成 PixelWizard:原生2K/4K视频生成10倍加速 今日论文速览 1. ERNIE-Image:百度8B DiT开源逼近闭源SOTA ERNIE-Image Technical Report | 百度 Baidu ERNIE Team | arXiv:2605.25347 关键词:ERNIE-Image·百度·8B DiT·MT-DMD 蒸馏·industrial-grade ⚠️ 前序问题:开源文生图模型与闭源顶级系统在指令跟随、文字渲染、美学质量上仍有明显差距。差距主要来自两件事:预训练数据噪声大且长尾概念覆盖差;后训练人类偏好对齐的稳定性不足,蒸馏期间还会出现 capability drift(蒸馏前能做的事,蒸馏后做不到了) 本文贡献:ERNIE-Image:8B 单流 DiT 架构开源文生图基础模型。预训练用 bottom-up 数据管线(细粒度分类 + 富 caption + 美学评估 + 分层采样)压噪同时保长尾;后训练 top-down 高需求场景 + 多样化 prompt + 稳定化 DPO;ERNIE-Image-Turbo 实现 8-NFE 高效生成,配套 MT-DMD 蒸馏算法缓解 capability drift。配套发布 industrial-grade ERNIE-Image-Aes 美学模型和 ERNIE-Image-Aes-1K benchmark(首个针对真实场景的美学评测基准) 实验效果:开源模型中达到 leading 表现,在指令跟随/文字渲染/美学三项接近顶级闭源商业模型;模型权重和美学评测资源全部开源,覆盖完整工业流水线(包括 Prompt Enhancer 把简短意图扩展为结构化视觉描述) 批判点评:「8B DiT + bottom-up 预训练 + top-down 后训练 + 稳定 DPO + Turbo 蒸馏」是教科书级的工业开源大模型训法,单独哪一项都不算新颖,但全部端到端打通、配套基础设施 + 评测开源是最大贡献。但闭源 SOTA(GPT-Image / Imagen 4 / Midjourney v7)的差距具体几何缺乏精确量化对比,且 industrial-grade aesthetic model 的偏好可能强烈反映中文用户审美,国际场景适用性需观察 2. Baton:首引语义蓝图驱动音视频联合生成 Baton: Explicit Semantic Blueprints for Joint Video-Audio Generation | 复旦大学, 腾讯混元 | arXiv:2605.25195 关键词:音视频联合生成·explicit planning·VA-Planner·腾讯混元·Relative RoPE ⚠️ 前序问题:开源扩散模型做音视频联合生成时,两个模态的去噪轨迹各自为政,导致音画不同步、长时一致性差。根因:现有方法用现成 encoder 的粗粒度 text embedding 引导音/视频去噪——这丢掉了细粒度语义,更关键的是缺少一个跨模态的「长 horizon 共享规划」 本文贡献:提出 Baton:首个引入 explicit semantic planning 的音视频联合生成框架。VA-Planner(带双语义对齐塔的多模态 LLM)让可学习 query 同时 cross-attend 视频和音频特征,吐出一对语义对齐的音/视频 planned token(关键帧级蓝图);这些 plan token 通过 cross-attention 注入扩散 backbone,与粗 text embedding 互补;进一步提出 Relative Semantic RoPE 把 planned token 和 latent 映射到共享时空坐标系,让 latent 准确 attend 到对应语义线索 实验效果:在标准音视频联合生成 benchmark 上定性定量都显著超过基线;首次把「先规划后渲染」的范式从单模态扩散扩展到跨模态联合扩散——和昨天 Bernini「MLLM 规划 + DiT 渲染」是同向延续 批判点评:「explicit semantic planning」做跨模态联合生成是非常对的方向——粗 text embedding 当指挥棒本来就太宽松。VA-Planner + Relative Semantic RoPE 解决了「plan 怎么对齐 latent」的工程关键。但 VA-Planner 多了一次 MLLM 推理,端到端时延和显存对比单 DiT 联合扩散需要进一步说明;planned token 颗粒度是 keyframe-level 而非 frame-level,复杂动作对齐上限仍受限 3. SpongeBob:首个端到端音视频联合编辑Sync+30% SpongeBob: Sync-Aware Harmonious Audio-Visual Generative Editing | 中科大 USTC | arXiv:2605.25193 关键词:音视频联合编辑·端到端·Sync-Aware·Context-Aware·USTC ⚠️ 前序问题:物理世界的视觉和声音本就耦合,但现有视频编辑全部是「视觉编完,再单独配音/换音」的解耦 pipeline,没有双向模态交互。结果是:(i) 音画不同步;(ii) 改动后的画面和保留下来的原音之间出现语义冲突(看到打字键盘却继续是说话声) 本文贡献:SpongeBob:首个端到端音视频联合编辑框架,带双向 cross-modal 交互。Sync-Aware Mechanism 通过双向注意力 + 时序对齐 + 空间约束让视觉编辑跟声音事件对齐;Context-Aware Module 用声/像 context attention 防止编辑后语义冲突;Sync-Preserving Training and Guidance(SPTG)在保持画质的同时强化对齐。配套构建可扩展数据管线 + subject-level 大规模数据集 + SpongeBob-Bench 评测 实验效果:Sync-C(音画同步指标)+30%、Ctx-F1(上下文一致性)+12.5%,显著超越现有 baseline;首次把「音视频编辑」推到 explicit joint 范式,让「改了画也改对应音」成为可能 批判点评:把音视频编辑从「解耦串行」改成「联合并行」是必要的下一步,Sync-Aware + Context-Aware 双模块设计简洁;但训练数据规模和评测集都依赖作者自建,第三方复现成本高;编辑场景的覆盖(替换/插入/删除)和真实创作工作流的对接深度还需后续验证 4. StreamChar:长时流式角色音视频实时生成 StreamChar: Long-Horizon Streaming Character Audio-Video Generation with Decoupled Orchestration | 阿里通义实验室 | arXiv:2605.25659 关键词:流式生成·角色动画·decoupled orchestration·阿里通义·sink-chunk memory ⚠️ 前序问题:实时流式的角色音视频联合生成要同时满足:(1) 说出指定 transcript;(2) 跨 chunk 保持视觉身份;(3) 严格的播放预算(低延迟)。三个目标相互掣肘——逐 chunk 的自回归生成会累积 transcript-audio 错位和视觉漂移;为低延迟而做的 few-step 蒸馏又会牺牲空间多样性和时序质量 本文贡献:StreamChar:把「长 horizon 规划」与「短窗音视频去噪」解耦的流式框架。LLM 编排器(orchestrator)用 transcript 和历史上下文产出帧对齐的音频条件;joint audio-video DiT 做局部双向去噪并带 reference + motion-frame conditioning;两阶段蒸馏先压缩 sampler 再用 online chunk rollout 微调 student;progress-aware pointer 在 rollout 训练时把部分 transcript 与生成音频对齐;sink-chunk memory 提供持久视觉 anchor 缓解长 horizon 漂移 实验效果:把流式 character animation 这个被低延迟严重压制的方向推到「长 horizon + 严格时延 + 身份稳定」可同时满足;解耦式架构让 LLM 做规划、扩散 backbone 做细节生成成为长视频流式生成的可行新范式 批判点评:把「orchestrator vs denoiser」解耦解决了流式 + 长时生成两难,sink-chunk memory + progress pointer 是非常针对性的工程设计。但 LLM orchestrator 引入额外推理路径,对端到端时延的真实贡献需要更细评测;joint audio-video DiT 蒸馏后的 student 与教师模型 audio-visual coherence 的差距上限值得跟踪 5. PixelWizard:原生2K/4K视频生成10倍加速 PixelWizard: Towards Efficient High-Fidelity Video Generation at Ultra-Large Spatial Resolution | 港科大广州, 小米 | arXiv:2605.25801 关键词:高分辨率视频·原生 2K/4K·10× 加速·分层 anchor·小米 ⚠️ 前序问题:高分辨率视频生成有两个相互耦合的瓶颈:(1) token 序列爆炸让优化偏向局部纹理而牺牲全局连贯(结构坍塌);(2) 训练成本巨大、推理延迟严重。简单堆分辨率根本不可持续 本文贡献:PixelWizard 把全局结构建模和细粒度细节合成分层解耦:先建立一个紧凑的时空 anchor 浓缩稠密结构先验,再以此引导高分辨率细节生成,缓解局部优化偏置;引入 Noise-Span Aligned Shortcut Training 让模型可以「大步」遍历生成轨迹(突破推理瓶颈);Exponential Index-Biased Sampling + Adaptive Noise-Span Calibration 把优化与高分辨率网格的偏移噪声 schedule 对齐,实现 robust few-step 推理且无需蒸馏的开销 实验效果:原生 2K/4K 视频生成加速 >10×,同时保证视觉质量;不依赖蒸馏(避免 capability drift),是高分辨率视频生成的「全栈式」效率优化方案 批判点评:分层 anchor + shortcut training 思路很正——直接面对「token 爆炸」根因。10× 加速 + 不蒸馏的组合非常吸引人;但与最新蒸馏路线(如 DMD2/Causal Distill)的端到端对比缺失,结构 anchor 是否能跨场景(人物运动/复杂相机)稳定泛化需要更细评测 6. Paris 2.0:首个去中心化预训练视频生成FVD减半 Paris 2.0: A Decentralized Diffusion Model for Video Generation | Bagel Network | arXiv:2605.26064 关键词:去中心化训练·DDM·视频生成预训练·FVD 2×·Bagel ⚠️ 前序问题:训视频生成模型几乎都要 monolithic GPU 大集群,开源社区无法独立完成时序连贯的视频生成预训练。前作 Paris 1.0 证明了图像生成可以分布式训练(去中心化扩散 DDM),但「时序连贯的视频生成」在 decentralized 训练范式下仍是 open problem 本文贡献:Paris 2.0:首个通过去中心化(decentralized)计算完成预训练的视频生成模型。训练 recipe 基于 Paris 1.0 的开源 DDM 扩展到视频领域,关闭了「分布式训视频」最后一块短板。同 compute budget 下与 monolithic 模型在相同数据上对照评估 实验效果:在 low-resolution 文生视频训练上,相同总算力预算下相比 monolithic baseline,FVD 从 561.04 降到 279.01(~2.0× 提升),CLIP 文本-视频相似度与美学分数双双提升。证明 decentralized 训练不仅可行而且能反超 monolithic——开源社区独立训视频基础模型门槛被显著拉低 批判点评:「分布式 GPU 也能训视频生成」是范式级的工程突破——把视频生成预训练的算力门槛从「必须有大集群」拉到「能聚起多组消费级 GPU」。同算力预算下反超 monolithic 是惊喜数字。但还停留在 low-resolution 段位,高分辨率长视频下分布式通信开销是否仍能 hold 住,是后续最大悬念 7. RTDMD:4步生成同时蒸馏对齐刷新SOTA Reinforcing Few-step Generators via Reward-Tilted Distribution Matching | Sea AI Lab, 港科大 | arXiv:2605.26108 关键词:few-step 扩散·蒸馏·RLHF·GRPO·FLUX.2 ⚠️ 前序问题:few-step 扩散蒸馏已能让图像生成又快又好,但和人类偏好对齐还是难——直接套 RLHF 会破坏蒸馏后的分布稳定性,难以兼得「步数少 + 画质高 + 对齐人类偏好」 本文贡献:RTDMD(Reward-Tilted Distribution Matching Distillation):两阶段统一蒸馏与 RL 对齐。理论上证明 minimizing KL 到「reward-tilted teacher」自然分解为分布匹配 + reward maximization 两项。Stage1:AC-DMD(Ambient-Consistent DMD)做子区间分布匹配 + consistency 正则化,让 fake score 模型追上漂移的 generator;Stage2:混合 policy gradient——GRPO-style estimator 处理随机中间步 + direct reward backprop 处理确定性 final step;进一步用 step-subset GRPO(SubGRPO)降方差 实验效果:在 SD3 / SD3.5 / FLUX.2 上仅 4 步推理就刷新 preference / aesthetic / compositional 三类指标 SOTA,超越此前所有 few-step 文生图方法,代码模型开源 批判点评:把蒸馏和 RL 对齐写成同一个 KL 优化问题在理论上很优雅,工程实现 AC-DMD + 混合 policy gradient + SubGRPO 三件套也都是合理设计;但 GRPO 在 4 步采样下的方差估计仍可能高,跨更多底模(SD3.5 / FLUX 之外)的稳定性需要更多验证 8. AFD:on-policy黑盒蒸馏自回归视频 On-Policy Adversarial Flow Distillation for Autoregressive Video Generation | 新加坡国立大学 NUS | arXiv:2605.26105 关键词:自回归视频·黑盒蒸馏·on-policy·flow-matching·Bradley-Terry ⚠️ 前序问题:自回归视频生成器对流式、长 horizon、交互应用非常有吸引力,但把强黑盒 teacher 蒸馏成 causal student 极其困难:student 必须在自己 rollout 分布下学习,而实际 teacher 通常只暴露 prompt-conditioned 完成的视频,结构/容量/时序设计/采样 schedule 都不同。这让 SFT 是 off-policy 的、score-based 蒸馏不适用、直接对抗模仿对去噪步级 credit assignment 又太稀疏 本文贡献:AFD(Adversarial Flow Distillation):异构黑盒视频蒸馏的 on-policy 框架。同 prompt 同时 query teacher 和 rollout 当前 student;训 prompt-paired Bradley-Terry discriminator 估计 clean-sample 教师-学生差异;把 on-policy advantage 转成 forward-process flow-matching 更新到 student 自己的 noised state 上。这套设计让 student 拿到稠密 velocity-field 监督,且无需 teacher score / latent / 去噪轨迹 / step alignment / reverse-chain RL 实验效果:把「自回归视频生成 + 黑盒强 teacher」蒸馏从死局拉到可行——这恰是流式视频 + 大闭源 teacher 时代的最关键工程问题。on-policy 学习避免分布漂移,flow-matching 转换提供稠密信号,是 RTDMD 在「自回归视频」侧的对偶贡献 批判点评:把「黑盒、异构、自回归视频」三个最难维度同时解决,思路非常对——on-policy + 对抗 + flow-matching 转换是当前最合理的组合。但 Bradley-Terry discriminator 在视频域的样本效率与训练稳定性、以及面对真正巨大闭源 teacher(如商用 Sora / Veo 级别)的 query 成本,是工程落地的真实门槛 9. TT-SAC:talking-head推理时自适应免训练 Test-Time Self-Adaptive Conditioning for Stable Audio-Driven Talking-Head Generation | 格里菲斯大学 Griffith | arXiv:2605.25488 关键词:talking-head·推理时自适应·免训练·feedback loop·身份保持 ⚠️ 前序问题:音频驱动 talking-head(AniTalker / FLOAT / Sonic 等)当前主流是:一张静态参考图条件整段视频生成。但静态身份条件 vs 动态面部运动天然错配,导致 identity drift、时序不一致、感知质量下降 本文贡献:TT-SAC(Test-Time Self-Adaptive Conditioning):完全 parameter-free 的推理时框架,让预训练 talking-head 模型在生成过程中自适应调整 conditioning,不需要重训、不需要梯度、不需要任何额外监督。把 generator 与 encoder 组成 feedback loop:generator 输出再被 encoder 编码,构造与时序动力学对齐的精修 conditioning;单步自适应即近似 self-consistent equilibrium,稳定跨时长的身份与运动 实验效果:把 talking-head 的「静态参考图」假设彻底打破——同一组预训练权重,仅靠推理时 feedback loop 即可显著缓解 identity drift 和时序退化;零训练成本即可升级现有 talking-head 模型,是非常实用的 plug-in 改造 批判点评:把 generator-encoder feedback 当作 implicit fixed-point 迭代是聪明的——既廉价又对预训练模型友好。但 single adaptation step 是否真能稳定逼近 self-consistent equilibrium 取决于具体模型,对发生面部大幅度运动或镜头切换时的鲁棒性需要更细评测;feedback 单步 vs 多步的边际收益曲线也值得展开 10. RVEDiT:MLLM注入Token让DiT分粒度推理编辑 Reasoning to Align: Implicit Reasoning in Diffusion Transformers for Video Editing | 华为 | arXiv:2605.24674 关键词:视频编辑·DiT·MLLM Token·分粒度路由·华为 ⚠️ 前序问题:指令视频编辑需要按自然语言改源视频,同时保留无关内容、保持时序一致。但现有 DiT 编辑器有两个结构性缺陷:(1) 条件信号不分粒度灌入所有 transformer block,单一 token 流既要编码全局意图又要编码细粒度证据;(2) cross-attention 模式只受 pixel-level 重建间接监督,内部推理过程完全不受约束 本文贡献:RVEDiT:implicit Reasoning Video Editing DiT。两个互补组件:(i) Granularity-Routed Token Conditioning——从 MLLM 蒸馏出 learnable editing token 路由到浅层 block,深层 block 留给原生视觉/文本 token,自然形成 coarse-to-fine 编辑过程;(ii) Reference-Anchored Attention Alignment——训练时用参数共享 reference 分支,最大化编辑/参考分支注意力特征的互信息,正则化内部推理但推理时零额外开销 实验效果:在标准指令视频编辑 benchmark 上一致超过 SOTA,对 localized 和 compositional 编辑提升最大;引入 MLLM 推理但部署时单分支,性价比高 批判点评:「分粒度路由 conditioning + reference 互信息对齐」两个手段都直击 DiT 编辑器的结构性病灶,思路非常清晰。但 MLLM 提供的 editing token 是离线蒸馏,可能不能捕捉新颖指令;reference 分支在训练时翻倍显存,长视频上的可扩展性需评测 11. Squeeze-MLLM:MLLM+VAE双条件根治主体生成贴图 Squeezing Capacity from Multimodal Large Language Models for Subject-driven Generation | 多伦多大学 U of T | arXiv:2605.26111 关键词:Subject-driven·MLLM·VAE 身份·DLA·copy-paste ⚠️ 前序问题:subject-driven 生成(保留参考主体身份 + 跟随文字指令)此前主流是 text 和 reference 各编各的——这天然削弱跨模态推理,并导致典型的 copy-paste artifact(参考图被原样贴上去)。最近 MLLM + diffusion 框架改善了指令跟随,但忽略了身份保持 本文贡献:把 diffusion model condition 在 MLLM 上(让 text 和 reference 联合编码),同时用 VAE 做 identity conditioning;新设 Dual Layer Aggregation (DLA) 模块聚合 MLLM 多层级特征做最优 conditioning;用多阶段去噪策略在推理时渐进式平衡 MLLM 提供的语义和 VAE 提供的细节身份 实验效果:把多模态理解和身份保持调和得很好,缓解了 copy-paste 问题,人类偏好评测上 subject-driven 生成超越现有方法;项目页面开放 批判点评:「MLLM 编联合语义 + VAE 守身份细节」的双通道是非常合理的分工——比纯 MLLM/纯 reference encoder 都更接近问题本质。DLA + 多阶段去噪是工程上的细致打磨;但 VAE 通道也可能引入贴图倾向(VAE 重建本身就有 identity 偏置),与最新 IP-Adapter / OmniGen 等的端到端对比是否在所有场景占优需要更细评测 趋势观察 国产开源文生图基础模型加速对标闭源 SOTA — 百度 ERNIE-Image 8B 单流 DiT 系统化打通预训练 bottom-up 数据 + 后训练 top-down + 稳定 DPO + Turbo 蒸馏 + 工业 aesthetic 评测全栈,且模型/数据全部开源——开源阵营在指令跟随/文字渲染/美学三项已逼近 GPT-Image/Imagen/Midjourney 等闭源顶级系统 音视频联合生成进入「规划 + 流式 + 编辑」三角范式 — Baton 用 VA-Planner(多模态 LLM)吐出音/视频共享语义蓝图驱动联合扩散;SpongeBob 通过双向 cross-modal 交互做端到端音视频联合编辑;StreamChar 用 LLM orchestrator 解耦长 horizon 规划与短窗去噪做流式角色音视频——音视频从「各编各的」彻底走向「联合规划 + 联合渲染」 视频生成同时突破两个壁垒:分辨率天花板与训练算力门槛 — PixelWizard 把全局 anchor 与细节合成分层解耦,加上 Noise-Span Aligned Shortcut Training,原生 2K/4K 视频生成提速 10× 且不蒸馏;Paris 2.0 首次完成 decentralized 视频生成预训练,同算力下 FVD 从 561→279(2×)反超 monolithic baseline——视频生成的「分辨率天花板」被工程化突破,「训练必须大集群」被打破 few-step 蒸馏从图像扩散扩展到自回归视频生成 — RTDMD 把蒸馏和 RL 对齐写成同一 KL 优化(4 步刷 SD3/FLUX.2 SOTA);AFD 把 on-policy 对抗 + flow-matching 转换组合用于黑盒异构 teacher 蒸馏 causal 视频 student——证明「步数少 + 画质高 + 对齐人类偏好 + 流式自回归」可以同时拿到,且不依赖白盒 teacher score / 轨迹访问 推理时自适应/编辑成为零训练能力升级标配 — TT-SAC 让 talking-head 模型在推理时通过 generator-encoder feedback loop 自适应 conditioning(免训练、免梯度);RVEDiT 把 MLLM 推理 token 路由到 DiT 浅层 block 形成 coarse-to-fine 编辑;Squeeze-MLLM 用 MLLM+VAE 双通道在推理时渐进平衡语义与身份——「不重训也能拿到新能力」正在成为生成模型的标准升级路径 人工智能炼丹君 整理 | 2026-05-26
-
AIGC 每日速读|2026-05-25|字节Bernini让MLLM规划DiT渲染视频 今日 AIGC 论文速览 今日共 11 篇 · 统一视频生成与编辑 2 篇 · Unified Audio 与音乐生成 2 篇 · 文生图基础架构与高清解码 3 篇 · 视频世界模型与可控生成 2 篇 · 高效推理与长上下文 2 篇 重点论文标题列表 Bernini:MLLM做语义规划DiT做像素渲染 StepAudio 2.5:单一音频基础模型三任务全SOTA ⚡ PiD:512潜变量→2048图像 <1秒解码 SCOPE:首个跨游戏FPS世界模型zero-shot迁移 DecQ:8个查询+3.9%算力把RAE重建拉满 今日论文速览 1. Bernini:MLLM做语义规划DiT做像素渲染 Bernini: Latent Semantic Planning for Video Diffusion | 字节跳动 Bernini Team | arXiv:2605.22344 关键词:统一视频生成·MLLM 规划·DiT 渲染·SA-3D RoPE·CoT ⚠️ 前序问题:MLLM 擅长跨模态推理与语义对齐,扩散模型擅长高保真像素合成——但目前两条路线要么混入一个端到端 unified model(损失各自强项),要么靠 adapter 松耦合(语义传递不充分)。视频生成与编辑亟需一种新分工,能把 MLLM 的语义规划能力和 DiT 的像素渲染能力同时榨干 本文贡献:提出 Bernini 统一视频生成与编辑框架:MLLM 规划器直接在 ViT embedding 空间预测目标语义表征(不是文本),DiT 渲染器以这个语义 plan 为主条件,文本特征 + 编辑场景下的源视频 VAE 特征做辅助引导。规划器和渲染器分开训练 + 轻量协同微调,保住各自预训练能力。引入 SA-3D RoPE(Segment-Aware 3D RoPE)处理多视觉输入,并在规划器中引入 CoT reasoning 把「理解」翻译成「生成指令」 实验效果:在多项视频生成与视频编辑 benchmark 上达到 SOTA;编辑任务上 MLLM 的预训练理解力可直接迁移为强泛化能力——挑战性编辑场景下尤其明显 批判点评:「MLLM 当规划器、扩散模型当渲染器」是非常合理的下一代统一架构分工——既避免了端到端 unified model 的能力打架,也比 adapter 路线传递了更丰富的语义。但论文用 ViT embedding 而非文本作为接口让组件互换性变差,规划器换到其他 MLLM 需要重新对齐;SA-3D RoPE 在多视觉输入场景的扩展上限(如 5+ 参考图)未充分测试 2. StepAudio 2.5:单一音频基础模型三任务全SOTA StepAudio 2.5 Technical Report | 阶跃星辰 StepFun | arXiv:2605.23463 关键词:Unified Audio·ASR·TTS·实时对话·RLHF ⚠️ 前序问题:Unified audio-language model 是大趋势,可现实是它们在 ASR/TTS/实时对话三件事上常常打不过专用系统——语义理解、生成合成、低延迟对话天生有结构与目标差异。如何让一个 backbone 同时压过三个专用 SOTA 是开放挑战 本文贡献:StepAudio 2.5 把「模态接口统一」与「目标分化」分两层处理:文本与音频共享多模态表征空间作为底座,任务特化由「数据构造 + 优化目标 + 解码策略」三件事决定。重头戏是把 post-training 从标准 SFT 升级为「任务定制 RLHF」——ASR 用可验证 multi-token decoding 提速、TTS 用 preference-based RLHF + context-rich supervision 保表现力、Realtime 用 generative reward modeling 框架优化人格一致与低延迟 实验效果:在 ASR / TTS / Realtime 三个方向的标准 benchmark 上同时达到 SOTA,证明「单一音频语言基础模型在三个目标上压过专用系统」是可行的——RLHF 是统一 backbone「分化部署」的关键钥匙 批判点评:把「目标分化交给 RLHF」是非常聪明的分工——既保住统一架构的训练效率,又给三个任务留出独立优化空间。但论文的 RLHF 训练成本巨大且对各任务的奖励信号设计依赖深,落地复现门槛高;与 GPT-4o / Gemini 这种闭源多模态对话模型的实时对话直接对比缺失 3. PiD:512潜变量→2048图像 <1秒解码 PiD: Fast and High-Resolution Latent Decoding with Pixel Diffusion | NVIDIA, 多伦多大学, Vector Institute | arXiv:2605.23902 关键词:Pixel Diffusion·高清解码·DMD2 蒸馏·6× 加速·RAE ⚠️ 前序问题:T2I 主流采用「潜空间扩散 + decoder 还原像素」两段式,但 decoder 是重建优化的——只学逆向 encoder,并不主动合成细节。当目标分辨率拉到百万级(megapixel),decoder 的计算变得非常昂贵,画质上限也被牢牢锁死 本文贡献:提出 PiD(Pixel Diffusion Decoder):把「latent → pixel」decoding 改写成「条件像素扩散」,统一了解码与超分两步。直接在高分辨率像素空间去噪,原生支持 4× / 8× 上采样;通过轻量 sigma-aware adapter 把含噪 latent 注入像素扩散 backbone,使 PiD 能在 latent 还没去噪完时提前接手,让上游 latent diffusion 提前停步。再用 DMD2 蒸馏把推理压到 4 步。同时支持普通 VAE latent 和语义 latent(SigLIP/DINOv2,给 RAE 模型用) 实验效果:512×512 latent 解码为 2048×2048 像素在消费级 RTX 5090 上 <1 秒(峰值 13GB),在 GB200 上最快 210ms——比 cascaded diffusion-based super-resolution 快约 6×,视觉保真度也更好。直接把「高清文生图」的推理成本拉到接近实用区间 批判点评:把 decoder 从「重建优化」改为「条件生成优化」是非常正确的方向——这是 RAE 路线之外又一条反思 latent decoding 的工作。<1 秒 2K 解码 + 6× 加速是少有的同时省时又提质的硬数字;但 PiD 与原生 pixel-space 扩散(如 PixArt-Σ pixel)之间的对比仍未完全展开,DMD2 4-step 蒸馏的稳定性如何随分辨率扩展仍需观察 4. SCOPE:首个跨游戏FPS世界模型zero-shot迁移 SCOPE: Simulating Cross-game Operations in Playable Environments for FPS World Models | 国科大 UCAS-Terminus AI Lab, 新加坡国立 NUS, 浙江大学, 港科大广州 | arXiv:2605.23345 关键词:FPS 世界模型·视频扩散·跨游戏迁移·CrossFPS·per-pixel 条件 ⚠️ 前序问题:FPS(第一人称射击)游戏的可玩世界模型,每一帧都要响应高频重叠的多种操作信号,同时还不能扰动屏幕中无关区域。已有方案要么全图注入动作信号(粒度太粗),要么只在单款游戏上训(无法跨游戏迁移) 本文贡献:观察到 FPS 操作具有「空间选择性」:开火/换弹只影响武器周围的局部 scope,而镜头/移动指令影响全局背景。SCOPE 在预训练视频扩散 transformer 的每个 block 插入条件模块,把特征重塑成 per-pixel 时序序列,每个位置根据本地视觉内容计算自己的动作响应——不依赖任何分割标注就把 in-scope 效果与 out-of-scope 生成分开。同时构建 CrossFPS:首个多游戏 FPS 数据集(7 款游戏、69K 帧对齐 10-DoF 控制信号片段),让模型学到游戏无关的视觉-动作映射 实验效果:训得的世界模型在多个未见场景上 zero-shot 迁移成功,动作响应度强、scope 分离精确,跨游戏泛化效果优——首次让 FPS 世界模型走出「单游戏专门训」的范式 批判点评:「scope 局部 vs 全局」的解构是非常贴近 FPS 物理直觉的观察,per-pixel 时序条件注入比全图条件优雅得多。CrossFPS 数据集让 FPS 世界模型有了 ImageNet 时刻的基础;但 10-DoF 控制信号离真实玩家的复杂连招仍有距离,对长 horizon 一致性(数百帧战斗)效果论文未充分披露 5. DecQ:8个查询+3.9%算力把RAE重建拉满 DecQ: Detail-Condensing Queries for Enhanced Reconstruction and Generation in Representation Autoencoders | 复旦大学, 上海 AI Lab | arXiv:2605.22777 关键词:RAE·DINOv2·细节 Query·重建生成解耦·3.9% 算力 ⚠️ 前序问题:Representation Autoencoder(RAE,把视觉基础模型当 tokenizer encoder)能让 latent diffusion 收敛更快、生成更好——但 VFM 必须冻住,限制了细粒度重建能力。如果反过来微调 VFM 解锁重建,又会破坏预训练语义空间、拖累生成。重建 vs 生成长期是 trade-off 本文贡献:DecQ 思路简单优雅:用一组轻量「detail-condensing queries」通过 condenser 模块从中间层 VFM 特征里抽取细粒度信息,再把这些 query 拼到 decoder 端辅助重建,同时在生成建模阶段与 patch token 一起被预测。深浅两层信息都被聚合,无需碰 VFM 主权重,重建-生成 trade-off 被巧妙绕开 实验效果:DINOv2-based RAE 上仅加 8 个 query 和 3.9% 额外算力,PSNR 从 19.13 dB 提到 22.76 dB(重建端 +3.6dB);生成端比 RAE 收敛快 3.3×,无 guidance FID 1.41、有 guidance FID 1.05——重建与生成同时提升且开销可忽略 批判点评:「不碰冻结 VFM、只加一组 query 当辅助通道」是非常 ROI 高的设计,是「冻结 vs 微调」之外的第三条路。从 PSNR / FID 数字看是确凿的正向贡献;但 8 个 query 是否够撑起更大分辨率(512+)下的细节量级仍待验证,与最新 token-merging / FlexQuery 等类似工作的对比略浅 6. SEGA:DiT训练免微调按频段动态缩放注意力 SEGA: Spectral-Energy Guided Attention for Resolution Extrapolation in Diffusion Transformers | 多伦多大学, Vector Institute | arXiv:2605.22668 关键词:DiT·分辨率外推·RoPE·训练免微调·频段自适应 ⚠️ 前序问题:DiT 在训练分辨率之外生成时画质显著掉,目前 training-free 方案常用 RoPE 外推 + 注意力 scaling 修正,但 scaling 都是一刀切——对 RoPE 各分量(含不同频段)施加同样的缩放,导致「全局结构 vs 细节恢复」此消彼长 本文贡献:提出 SEGA:完全 training-free,根据每个去噪步 latent 的空间-频段结构,动态地对 RoPE 不同分量分别 scaling。低频分量保结构、高频分量恢细节,按内容自适应分配——而不是固定常数 实验效果:多个目标分辨率上一致提升 DiT 高分辨率合成质量,超过现有 training-free 基线;不需要重训,可即插即用 批判点评:「不同频段差别 scaling 而不是常数」是经过谱分析后的小而正确的改进,对 DiT 高清生成是廉价收益。但论文主要在 SD3/FLUX 系列上验证,更激进外推倍率(如 4×)下是否仍稳健没充分展开;与 ScaleCrafter / FreeU 等同类训练免微调方案的端到端定量对比较少 7. Gated DeltaNet-2:线性注意力擦写解耦1.3B全面胜出 Gated DeltaNet-2: Decoupling Erase and Write in Linear Attention | NVIDIA | arXiv:2605.22791 关键词:线性注意力·Gated DeltaNet·擦写解耦·长上下文·NVIDIA ⚠️ 前序问题:线性注意力把无界 softmax cache 压缩成固定 recurrent state,难点不在于「忘掉什么」而在于「怎么编辑这个压缩记忆而不打乱已有联系」。已有 Delta-rule 模型用 scalar gate 同时控制 key 端的擦除和 value 端的写入——一个标量做两件事,能力被绑死 本文贡献:Gated DeltaNet-2(GDN-2)泛化了 Gated DeltaNet 与 KDA:把 erase 与 write 解耦成两个 channel-wise gate(擦除门 b_t / 写入门 w_t);两者塌缩到同一 scalar 时退化为 KDA,再叠加 decay 塌缩则退化为 Gated DeltaNet。配套给出 fast-weight 更新视角、chunkwise WY 算法(channel-wise decay 吸收到非对称 erase 因子)、gate-aware backward——保住了高效并行训练 实验效果:1.3B 参数在 100B FineWeb-Edu tokens 上训完,在语言建模/常识推理/检索上综合超过 Mamba-2 / GDN / KDA / Mamba-3 变体;在 RULER 长上下文 needle-in-a-haystack 多 key retrieval 上优势最大,纯循环与混合架构都强。代码开源 批判点评:「擦除/写入解耦」是 linear attention 设计上一个本应早被做的细节修正——一个 gate 控两件事本来就是工程妥协。GDN-2 是少有「同时改写规则又保住并行训练」的设计;但论文聚焦语言建模,对视觉生成场景(视频扩散 / 多模态 backbone)线性注意力替换的实际收益尚需后续验证,1.3B 规模在 7B+ 是否仍领先 Mamba-3 也是开放问题 8. Geo-Align:首个相机控制视频生成RL几何奖励 Geo-Align: Video Generation Alignment via Metric Geometry Reward | 中科大, 上海 AI Lab, 浙大 | arXiv:2605.23903 关键词:相机控制视频·RL 对齐·metric 3D 奖励·video re-rendering ⚠️ 前序问题:相机控制视频生成(video-to-video re-rendering)此前几乎全靠合成数据上的 SFT,真实多视角同步视频极度稀缺,模型在真实 OOD 视频上对物理尺度与相机轨迹的遵循非常差——「能拍但不像」一直没解决 本文贡献:Geo-Align 首次为相机控制视频再渲染提出 RL 框架:基于预训练模型,用「尺度感知感知奖励」对齐。具体而言引入 metric 3D estimator 从生成视频中抽取精确相机轨迹,对 rotation / translation 偏差显式惩罚;数据 pipeline 精心设计——以真实条件视频 + 合成数据派生的目标相机轨迹训练,消除对 paired data 的依赖 实验效果:相机可控性与视觉保真度同时优于现有 SFT 基线,验证 metric geometry 奖励是补救「合成 → 真实」迁移损耗的有效手段——是 video re-rendering 的下一步 批判点评:把 video re-rendering 从 SFT 推进到 RL + 几何奖励是必然的下一步,metric 3D estimator 当 reward model 思路漂亮;但 metric 3D estimator 本身的精度上限直接决定奖励质量,对动态场景(人物快速运动、遮挡)的估计误差如何不被奖励放大需要后续验证 9. LMDM:消费级笔记本跑实时音乐扩散 Live Music Diffusion Models: Efficient Fine-Tuning and Post-Training of Interactive Diffusion Music Generators | UC San Diego, CMU, Mila, Northeastern | arXiv:2605.22717 关键词:音乐扩散·实时生成·KV Cache·ARC-Forcing·consumer GPU ⚠️ 前序问题:现在最强的「实时流式音乐生成」走的是 discrete-AR(离散自回归)路线,训练和推理都要工业级算力。开源社区强势的音频扩散是双向、非流式的——理论上不能做实时演奏 本文贡献:LMDM 重新审视 block-wise outpainting 扩散管线:识别出诸多推理瓶颈是它比 discrete-AR 慢的根因,提出 block-wise KV Caching 补回;进一步引入 ARC-Forcing post-training,无需 RL 或 reward model 就能稳健做对齐,缓解 error accumulation 实验效果:扩散模型首次在推理复杂度上反超离散 AR 路线,能在消费级游戏本上本地实时跑——支持文条件生成、草图条件音乐合成、jamming;论文还展示了 LMDM 作为「generative delay」在真人音乐家即兴演奏中的真实艺术家-AI 合作 批判点评:把扩散从「非流式」拉到「实时演奏」是开源社区音频生成的关键一步——把 KV Cache 思路从语言模型迁过来很合理。但和 Suno/Udio 这类闭源系统直接对比缺失,对极长(>10 分钟)持续演奏的稳定性论文未深入讨论;ARC-Forcing 替代 RLHF 的 robustness 在不同流派/复杂编曲下的表现仍需更多实验 10. ETCHR:图像编辑器即多模态推理助手 ETCHR: Editing To Clarify and Harness Reasoning | 上海 AI Lab, 港中文 | arXiv:2605.23897 关键词:Think with Images·图像编辑·推理增强·VLM 奖励·MLLM 解耦 ⚠️ 前序问题:MLLM「think with images」范式越来越火,但 toolkit 路线被固定动作束缚,unified 路线产生的中间图常常很噪。如果想用「专用图像编辑器」当 MLLM 的视觉推理助手,会遇到两个 gap:(1) language-side,被动指令跟随的编辑器无法把抽象问题映射成合适的视觉变换;(2) generation-side,推理深度增加时编辑正确性快速退化 本文贡献:ETCHR 提出一个「question-conditioned, reasoning-aware」图像编辑器,与下游 understanding model 完全解耦。两阶段训练:第一阶段 Reasoning Imitation(在编辑轨迹上 SFT),第二阶段 Reasoning Enhancement(用 VLM-derived 奖励同时优化编辑正确性 + 下游推理准确率)。解耦让 ETCHR 可以 plug into 任意开闭源 MLLM 而无需重训 实验效果:覆盖细粒度感知/图表理解/逻辑推理/拼图复原/3D 理解 5 类任务,Pass@1 平均提升:Qwen3-VL-8B +4.82(55.95→60.77)、Gemini-3.1-Flash-Lite +5.47(65.08→70.55)、1T MoE Kimi K2.5 +4.61(76.55→81.16)——证明 reasoning-aware editor 通用有效 批判点评:「编辑器作为 MLLM 的可插拔视觉推理助手」是非常正确的下一步分工,比 toolkit / unified 两条路线都更模块化。但 ETCHR 训练强依赖 VLM-derived rewards,奖励信号的偏差可能复制到编辑器;与最新 unified MLLM(如 GPT-4o Image / Bagel)端到端的 think-with-image 能力对比还需要更全面 11. Swift Sampling:泰勒展开找时序惊奇帧0.02倍开销 Swift Sampling: Selecting Temporal Surprises via Taylor Series | Microsoft Research India | arXiv:2605.22678 关键词:长视频·帧选择·预测编码·Taylor 展开·训练免微调 ⚠️ 前序问题:长视频里大部分帧冗余,关键信息藏在「时序惊奇」——视觉特征偏离了预测轨迹的瞬间。已有 training-free 帧选择要么靠辅助网络(额外算力),要么靠视频特化的超参(不通用) 本文贡献:受脑科学预测编码启发,Swift Sampling 把视频建模成视觉 latent 空间里可微的轨迹,计算 velocity 和 acceleration,用 Taylor 展开预测后续帧的「预期路径」。偏离预期最猛的帧 = 时序惊奇帧 = 应被采样的关键帧。训练免微调、几乎零额外开销 实验效果:比基线只多 0.02× 算力开销(比领先方法的 overhead 还低 30×)。3 个长视频 QA benchmark + 10 个下游任务上一致优于 uniform sampling 与其他 query-agnostic 基线;长视频小预算场景下提升最大(+12.5 分准确率) 批判点评:「预测编码 → Taylor 外推 → 惊奇帧」的链条简洁且物理直觉强,几乎零成本是工程上极少见的免费收益。但 Swift Sampling 是 query-agnostic 的——任务相关的关键帧(需要 query-conditional)仍是它的盲区,未来与 query-aware 方法的组合空间巨大 趋势观察 统一架构出现新分工:MLLM 当语义规划器,扩散/像素模型当渲染器 — Bernini 用 MLLM 在 ViT embedding 空间预测目标语义,DiT 拿这个 plan 当主条件渲染像素;ETCHR 把编辑器训成 MLLM 可插拔的视觉推理助手——「端到端 unified」之外,「语义规划 + 像素渲染」的分工路线正在成型。这条路线把各组件的预训练能力都榨干,比 adapter 更深、比端到端更模块化 像素空间扩散解码器替代传统 VAE:高清/高效解码的新范式 — PiD 把 latent→pixel 改成条件像素扩散,512 latent <1 秒解到 2048 像素(消费级 RTX 5090),比 cascaded SR 快 6× 且画质更好;DecQ 不动 RAE 冻结 VFM 只加 8 个 query + 3.9% 算力就让重建 PSNR +3.6dB、生成收敛快 3.3×——「decoder 该重建还是该生成」的争论开始让位给「decoder 应同时承担解码与上采样」的新范式 Unified Audio 模型靠任务定制 RLHF 同时压过专用系统 — StepAudio 2.5 把 ASR/TTS/Realtime 三件事架在共享 backbone 上,让任务分化交给「数据 + RLHF reward + 解码策略」三件套——ASR 用可验证 multi-token decoding、TTS 用 preference RLHF、Realtime 用 generative reward modeling,最终三项 benchmark 同时 SOTA。证明「unified 不必妥协」的关键钥匙是 RLHF 视频生成对齐从 SFT 走向几何/物理约束的强化学习 — Geo-Align 首次给相机可控视频再渲染加 RL:用 metric 3D estimator 抽取相机轨迹,对 rotation/translation 偏差显式给奖励,不再依赖稀缺的 paired 真实多视角数据。SCOPE 的 per-pixel 时序条件设计也隐含「空间选择性」的物理直觉——视频生成的对齐方式开始引入几何/物理约束 推理期免训练优化在文生图/长视频/长上下文遍地开花 — SEGA 给 DiT 做按频段自适应注意力 scaling 解决高分辨率外推;Swift Sampling 用 Taylor 展开找时序惊奇帧选关键帧(0.02× 开销 +12.5 分);GDN-2 把线性注意力的 erase/write 解耦改善长上下文检索——「免训练 + 信号利用」的范式从图像扩散扩到视频/语言全场景,给落地侧带来快速收益 人工智能炼丹君 整理 | 2026-05-25
-
AIGC 每日速读|2026-05-21|智能编辑成统一模型通用任务Uni-Edit 今日 AIGC 论文速览 今日共 13 篇 · 统一多模态与图像编辑 2 篇 · 视频生成与编辑 5 篇 · 高效推理与稀疏注意力 3 篇 · 安全与可控生成 2 篇 · 图像复原与评测 2 篇 重点论文标题列表 Uni-Edit:智能编辑成为统一模型唯一训练任务 FullFlow:只训LoRA把T2I升级成双向多模态 ⚡ DVG:时空联合自适应HunyuanVideo提速7倍 BA-Att:块预降采样稀疏注意力提速7倍 FlowLong:滑窗加流形约束推理期出长视频 今日论文速览 1. Uni-Edit:智能编辑成为统一模型唯一训练任务 Uni-Edit: Intelligent Editing Is A General Task For Unified Model Tuning | CUHK MMLab | arXiv:2605.21487 关键词:UMM 统一多模态·智能图像编辑·通用任务·BAGEL·Janus-Pro ⚠️ 前序问题:统一多模态模型(UMM,理解+生成+编辑三件事一起做)当前主要靠混合多任务训练。但任务之间天生冲突,逼出了复杂的多阶段 pipeline、海量数据混合和各种平衡 trick——结果只是性能折中而非真正互相增强 本文贡献:提出 Uni-Edit:智能图像编辑作为 UMM tuning 的「第一个通用任务」。一个任务、一个训练阶段、一个数据集就能同时提升理解/生成/编辑三种能力。为此构建首个自动化可扩展智能编辑数据合成 pipeline:把多样 VQA 数据转化为带嵌入问题和嵌套逻辑的复杂编辑指令,得到 Uni-Edit-148k 数据集(reasoning-intensive 指令 + 高质量编辑图像) 实验效果:BAGEL 与 Janus-Pro 上仅用 Uni-Edit 单任务训练即获得三种能力的全面增强,无需任何辅助操作;模型/数据/代码已开源在 HuggingFace 和 GitHub 批判点评:「编辑作为通用任务」的洞察是范式级——编辑天生需要「理解 + 生成」两件事,这是其作为通用任务的根本理由;但 Uni-Edit-148k 是 VQA 数据合成的,复杂场景下指令质量上限仍受 VQA 数据集决定;BAGEL/Janus-Pro 之外能否泛化到更多 UMM(OmniGen/UniGen)需要后续验证 2. FullFlow:只训LoRA把T2I升级成双向多模态 FullFlow: Upgrading Text-to-Image Flow Matching Models for Bidirectional Vision-Language Generation | ETH Zürich, Google Zurich | arXiv:2605.20316 关键词:统一多模态·LoRA 升级·Rectified Flow·双向生成·参数高效 ⚠️ 前序问题:现代 T2I 扩散模型有强视觉先验,但只暴露在单向 text→image 生成。从 T2I 衍生的统一视觉语言模型要么靠大规模联合预训练,要么大幅重训文本通路——两者都浪费了 T2I backbone 已经学到的强图像先验 本文贡献:提出 FullFlow 参数高效配方:只训 LoRA 适配器和轻量 text head 就把预训练的 rectified-flow T2I 模型升级成双向 vision-language 生成器。图像保持原生连续 flow,文本走离散 insertion 过程;图像/文本独立 timestep 让推理变成「二维生成空间」中的轨迹选择,单 backbone 同时支持 text→image / image→text / 联合采样 / partial-text 预测 实验效果:在 SD3 上同等可训参数和 LoRA rank 下,T2I FID 62.7 → 31.6,I2T CIDEr 2.0 → 99.4(远超之前 SOTA Dual Diffusion);峰值 VRAM 从 ~84GB 降到 ~38GB,吞吐 8×(双 RTX A5000 训 24h,仅训 ~5% backbone 参数);同样配方迁移到 FLUX.1-dev 并支持 partial-text 做下游 VQA 批判点评:5% 参数开销实现双向多模态是非常高 ROI 的工程贡献——把扩散视觉先验「升级 vs 重建」拉到了正确选择;但 image→text CIDEr 99.4 vs Dual Diffusion 2.0 的对比量级悬殊,可能反映 baseline 设置问题;与原生统一模型(BAGEL/Janus)的端到端能力对比缺失 3. DVG:时空联合自适应HunyuanVideo提速7倍 Dynamic Video Generation: Shaping Video Generation Across Time and Space | 上海交大, 华南理工, 清华大学 | arXiv:2605.21042 关键词:视频扩散加速·时空联合·渐进分辨率·HunyuanVideo·近无损 ⚠️ 前序问题:视频扩散每步要处理大量 token,迭代去噪极昂贵。最近渐进分辨率采样在早期阶段降 latent 分辨率取得加速,但 scale 到视频上仍困难——时序维度引入跨视频差异巨大的时空需求,只压一个维度要么加速有限要么质量退化 本文贡献:提出 DVG(Dynamic Video Generation)框架:跨时间和空间联合分配计算,自动选择内容感知(content-aware)的加速策略,无需手工调参或重训。通过学习每个视频的最佳时空降采样模式,实现近无损加速 实验效果:HunyuanVideo / HunyuanVideo-1.5 上达到 7× 加速;与蒸馏组合可达 18× 加速;近无损跨模型跨任务,可作为大规模高效视频生成系统的关键组件——代码开源 批判点评:把渐进分辨率从空间扩到时空联合是合理的下一步,自动 content-aware 策略避免了手工 schedule;但加速倍数高度依赖底模容量与内容多样性,对极端运动场景的 robustness 论文未充分披露;7×→18× 的复合是否保留各自的画质底线需更细粒度评测 4. BA-Att:块预降采样稀疏注意力提速7倍 Efficient Long-Context Modeling in Diffusion Language Models via Block Approximate Sparse Attention | 香港科大, 港大, 浙大, 港中文 | arXiv:2605.19726 关键词:扩散语言模型·稀疏注意力·块降采样·FlashAttention·长上下文 ⚠️ 前序问题:扩散语言模型(DLM)能做全局连贯、双向、可控文本生成,但 scale 到超长序列仍昂贵。现有 block-sparse attention 用固定采样模式(尾部、反斜对角条带)选块——这种 prior-driven 采样会漏关键 token、分布偏移下不稳定 本文贡献:提出 BA-Att 框架:block-wise 预降采样操作在压缩空间识别 informative 区域,避免依赖脆弱的位置先验。理论上定义 oracle post-downsample attention map,形式化前 vs 后降采样方案的近似误差;引入轻量 norm-sorting 模块和协方差补偿修正(用对角 QK 方差近似完整协方差),降复杂度 实验效果:比 FlashAttention 加速最高 6.95×;50% 稀疏度下保持接近 full-attention 性能,跨语言模型/多模态语言模型/视频生成模型一致——证明高效率和强泛化 批判点评:把 sparse attention 的「选块」从 prior-based 升级到 learned downsampled space 是非常正确的方向,6.95× 加速比 FlashAttention 还快是亮眼的工程数字;但 50% 稀疏率下「接近 full」的具体差距需更精细评测;对极长上下文(1M+)的渐近行为仅理论保证而无实测 5. FlowLong:滑窗加流形约束推理期出长视频 FlowLong: Inference-time Long Video Generation via Manifold-constrained Tweedie Matching | KAIST, Amazon | arXiv:2605.20910 关键词:长视频生成·推理期方法·Tweedie matching·滑窗·流形约束 ⚠️ 前序问题:把视频扩散模型生成时长扩到长序列一直没解决:双向模型扩展紧绑架构且长距退化严重,自回归模型有 exposure bias 累积漂移并产生重复运动。现有 training-free 方案没有同时跨这两条路线 本文贡献:提出 architecture-agnostic 推理期长视频生成方法:滑动重叠窗口生成长视频,相邻窗口预测的 clean sample 通过 Tweedie matching 在重叠区强制流形约束 + 时序一致;high-noise 阶段用 stochastic early-phase sampling,每次 Tweedie matching 校正后注入新噪声同步窗口轨迹,再切到 deterministic ODE sampling 保留细节 实验效果:可生成数倍于原生窗口长度的视频,时序一致性和视觉质量超越 training-free 与自回归两类基线;同一思路无微调即可扩展到音视频联合生成、文生 3DGS——证明这套方法是通用的 批判点评:Tweedie matching 在窗口边界做修正是 elegant 的解法,几乎是「无需训练」的最简扩展;但滑窗推理时延比单 pass 显著增加,长视频对内存的累积压力不算小;与原生因果模型(如 Causal Forcing++/Mutual Forcing)相比,缺少同等长度下的直接对比 6. StreamGVE:少步流式生成做训练免视频编辑 StreamGVE: Training-Free Video Editing via Few-Step Streaming Video Generation | UBC ECE | arXiv:2605.21466 关键词:视频编辑·训练免微调·少步流式生成·noise-to-data·双分支 ⚠️ 前序问题:视频编辑方法可行但要花很多昂贵迭代且编辑结果质量勉强。作者把症结归因到「data-to-data」范式——它和现代生成模型(noise-to-data)天生不兼容,绕远路反而拉低了编辑质量 本文贡献:从 noise-to-data 视角重做视频编辑:基于预训练的流式生成模型构建 StreamGVE,保留 few-step 采样并无缝注入源视频条件;引入双分支快速采样(self-attention bridge + cross-attention grounding/boosting)兼顾采样和条件;提出 source-oriented guidance 提目标质量,再加 visual prompting 增强编辑灵活性 实验效果:在多种视频编辑任务上一致超越现有方法,即使在 few-step 设置下也能以最少时间代价完成;方法对不同底模具有鲁棒性和泛化能力 批判点评:把视频编辑「从 data-to-data 转向 noise-to-data」是个范式级洞察,能直接复用流式生成模型的少步能力——很省工;但在风格迁移、物体替换等具体编辑任务上的优势是否一致需要更细分对比;source-oriented guidance 的强度调参成本未明 7. FlowErase-RL:首个GRPO范式的概念擦除框架 FlowErase-RL: Rethinking Concept Erasure as Reward Optimization in Flow Matching Models | 哈工大深圳, 清华深圳, 吉林大学, 鹏城实验室, 清华大学 | arXiv:2605.19739 关键词:Flow Matching·概念擦除·GRPO·安全生成·双路径奖励 ⚠️ 前序问题:Flow Matching 文生图模型质量飞涨同时安全风险也在加剧,要擦除有害/不想要的概念。现有方案要么是推理期干预(效果有限),要么靠 SFT(依赖精对齐数据 + 多概念扩展性差)——擦除问题一直缺少更优范式 本文贡献:首次把概念擦除重新表述为 reward optimization 问题,提出基于 GRPO 的 FlowErase-RL:(1) 双路径动态奖励——CE(Concept Erasure)奖励抑制目标概念,NS(Non-target Space)奖励保住生成质量;(2) 性能驱动的自适应切换策略,无需显式监督就能稳定训练;通用支持裸露/物体/艺术风格三类擦除 实验效果:裸露/物体/艺术风格三类擦除均达 SOTA,图像质量与语义对齐保持很好;对抗攻击鲁棒性强,多概念场景扩展性好——开辟了 Flow Matching 安全可控生成的新范式 批判点评:把擦除从 SFT 转向 RL 是聪明的——擦除本质是分布偏移而非分类,RL 的奖励更贴合;但 GRPO 训练成本不低,CE/NS 双奖励的权重边界对效果影响多大未深入消融;擦除概念之间的相互干扰(擦了概念 A 影响概念 B 的生成)这一长尾问题未充分讨论 8. CPC-VAR:首次给VAR模型做持续多概念个性化 CPC-VAR: Continual Personalized and Compositional Generation in Visual Autoregressive Models | 哈工大深圳, 清华深圳国际研究生院, 鹏城实验室, 华南理工 | arXiv:2605.19750 关键词:持续学习·VAR 个性化·概念神经元·多概念合成·解纠缠 ⚠️ 前序问题:Visual Autoregressive(VAR)做文生图效率高,但现有 VAR 个性化只能静态训单概念——序列学新概念时旧概念会被灾难性遗忘,多概念合成又会出现特征纠缠和属性不一致。这是 VAR 个性化生成的两个老大难 本文贡献:首次系统研究 VAR 持续个性化生成,提出统一框架。两个核心组件:(1) GCNS(Gradient-based Concept Neuron Selection),找到每个概念相关的神经元,只约束跨任务冲突参数,不扩展模型也能抗遗忘;(2) 上下文感知组合策略:多分支特征建模 + 空间条件引导的局部 cross-attention 融合,做精确解纠缠的多概念合成 实验效果:长序列持续个性化场景下显著领先现有 baseline,多概念图像合成上也优于现有方法,证明 VAR 完全有能力做可扩展可控的个性化生成 批判点评:VAR 个性化第一次被系统化研究是好事,神经元级别的 GCNS 设计也比经典扩散模型路线(DreamBooth/LoRA)更经济;但实验是否覆盖到 10+ 概念的真实长尾、跨概念组合的失败模式分析略浅,VAR 底模本身的天花板(vs 扩散模型)没有正面比较 9. DyMoS:一个标量旋钮控 I2V 运动幅度 Rebalancing Reference Frame Dominance to Improve Motion in Image-to-Video Models | 延世大学 Yonsei, GIST, Adobe Research | arXiv:2605.19398 关键词:I2V·运动控制·注意力 rebalance·训练免微调·DyMoS ⚠️ 前序问题:I2V(image-to-video)相比 T2V 生成的视频普遍过于静态。前人方案靠削弱或修改图像条件来增加运动,但要么需要额外训练,要么牺牲了对参考图像的保真度——「动起来 vs 像参考图」是个长期 tradeoff 本文贡献:识别出「reference-frame dominance」是动作抑制的核心机制:非参考帧对参考帧 key token 分配过多 self-attention,导致参考信息被过度跨时传播、压制了帧间动态。提出 DyMoS(Dynamic Motion Slider):训练免微调、模型无关,初始去噪步 rebalance 生成帧到参考帧的注意力路径,输入图和模型权重都不动,只引入一个标量参数连续控制运动强度 实验效果:多个 SOTA I2V backbone 上一致提升运动动态,同时保持视觉质量和对参考图的保真度;提供 user 一个可调的运动旋钮 批判点评:把「动起来 vs 像参考图」从冲突变成可调旋钮是非常实用的工程贡献;但 attention rebalance 的具体公式对不同架构可能需重新调,论文给出的 generality 主要在 SD 系列底模;标量旋钮是否能控制不同方向的运动(横向 vs 纵向)需要更细粒度评测 10. MSAVBench:首个多镜头音视频生成评测基准 MSAVBench: Towards Comprehensive and Reliable Evaluation of Multi-Shot Audio-Video Generation | 复旦大学, 港大, 阿里通义实验室, 浙大, 北大 | arXiv:2605.20183 关键词:多镜头音视频·评测基准·导演级控制·自适应分镜·MSAVBench ⚠️ 前序问题:视频生成正从单镜头扩展到复杂多镜头音视频(MSAV)叙事,但评测仍是基础性挑战——现有 benchmark 范围有限、数据多样性不足、评测流水线僵化,无法系统可靠地评估现代 MSAV 模型 本文贡献:推出 MSAVBench 首个面向多镜头音视频生成的综合评测基准 + 自适应混合评测框架。覆盖视频/音频/镜头/参考四个维度,多种任务设置,最多 15 个镜头,挑战性的非真实场景。评测框架的鲁棒性来自三件事:分镜分割的自适应 self-correction、主观指标的实例级 rubric、复杂判断的工具溯源证据抽取 实验效果:与人类判断的 Spearman 秩相关达 91.5%,对齐度极高;系统评测 19 个 SOTA 闭源/开源模型显示:当前系统在导演级控制和细粒度音视频同步上仍有困难,模块化/agentic 生成 pipeline 是缩小开源-闭源差距的有前途路径;benchmark 数据和评测代码将开源 批判点评:把音视频生成评测从「单镜头质量」推进到「多镜头叙事 + 导演级控制」是必要的下一步;91.5% Spearman 与人类对齐很高,自适应分镜 self-correction 是工程亮点;但 15 个镜头作为基准上限对真正的长视频(>5 分钟、几十个镜头)覆盖度有限;非真实场景的标注成本与一致性如何控制仍是开放问题 11. CogOmniControl:专用CogVLM认知创意意图引导生成 CogOmniControl: Reasoning-Driven Controllable Video Generation via Creative Intent Cognition | 澳门大学 SKL-IOTSC, 腾讯 Online-Video BU | arXiv:2605.19995 关键词:可控视频生成·专业 VLM·创意意图认知·闭环 harness·in-context ⚠️ 前序问题:视频扩散模型对 abstract / 稀疏 / 复杂条件依然脆弱——专业制作工作流(分镜草图、黏土渲染等)下表现差。现有方案要么用 adapter 注入条件,要么把通用 VLM 耦合到扩散 backbone——能力鸿沟仍在,难以输出对齐用户创意意图的视频 本文贡献:提出 CogOmniControl 推理驱动框架:把可控视频生成因式分解为「创意意图认知」+「生成」。专门用真实动漫制作数据训了一个专业版 CogVLM,比通用 VLM 更准确地从稀疏抽象条件中识别用户创意意图,转译成密集 reasoning 输出;CogOmniDiT 通过 in-context generation 统一多种条件,并用 RL 对齐到 CogVLM reasoning 输出。进一步利用 CogVLM 做评测与 Best-of-N 选择,整个框架是闭环 harness 架构。同时发布 CogReasonBench / CogControlBench 来自专业工作流的真实创意意图数据 实验效果:两个 benchmark 上一致超越现有开源模型,在分镜草图、黏土渲染等专业条件下尤其明显——证明专业 VLM 介入的认知能力对可控生成是有效的 批判点评:专业 VLM 当「创意意图认知器」是个新颖思路,引入 reasoning 缓解条件稀疏问题——但训练专业版 VLM 的数据规模有限,跨垂直域(动漫→真人/工业)泛化未验证;闭环 harness 架构推理时延偏高,落地工业流水线存在挑战 12. DiSI:单模型连续滑动失真感知权衡 Disentangling Generation and Regression in Stochastic Interpolants for Controllable Image Restoration | 同济大学, 复旦大学 | arXiv:2605.21381 关键词:图像复原·Stochastic Interpolant·生成-回归解耦·失真感知权衡·像素空间 ⚠️ 前序问题:图像复原(IR)领域生成式(Diffusion/Flow Matching)擅长合成真实纹理但慢且像素保真度差;经典回归式方法单步高效像素准确——两条路线长期不能兼得 本文贡献:提出 DiSI 统一框架:把底层 Stochastic Interpolant 过程显式解耦为独立的生成分量和回归分量。这种解耦让模型在「纯回归 → 全生成」之间连续可控过渡。技术上提供两条具体采样轨迹和统一 sampler 支持任意轨迹的少步推理;网络是像素空间的双分支 U-Net 风格 transformer(专用分支增强条件引导同时保高吞吐) 实验效果:在多种 IR 任务上以高效率取得有竞争力的结果;独有特性:单一模型推理期就能控制失真-感知 tradeoff(distortion-perception trade-off),不再需要训多个模型 批判点评:把 SI 过程拆成生成+回归两个可独立调用的分量,在理论上很优雅,给「失真-感知」连续控制提供了第一种统一手段;但实际 IR 任务中如何选择最佳轨迹(用户需指定 tradeoff?)的 UI/控制接口论文未深入讨论;与最新 OSEDiff/PASD 等方法的端到端对比有所欠缺 13. ABSS:初始几步注意力筛 seed 提画质 Boosting Text-to-Image Diffusion Models via Core Token Attention-Based Seed Selection | Brandeis University | arXiv:2605.19532 关键词:文生图·Seed Selection·Cross-Attention·训练免微调·SD ⚠️ 前序问题:文生图扩散模型的输出对随机 seed 极度敏感——不同 seed 同 prompt 画质和文图对齐差异巨大。但「该用哪个 seed」一直靠盲选,缺乏系统的预选机制 本文贡献:观察到一个关键现象:在前几步去噪过程中,对 prompt 中 core token(content-bearing words)的 cross-attention dynamic 强烈预测最终生成质量。基于此提出 ABSS(Attention-Based Seed Selection),训练免微调即插即用:候选 seed 跑前几步,用对 core token 的 cross-attention 打分排序,只保留 top-k 完成完整生成,不需要固定阈值 实验效果:三个 benchmark 上 Stable Diffusion 各变体的文图对齐和视觉质量一致提升,人工偏好与对齐指标都有改善;可作为现有 seed 优化 pipeline 的轻量预选附加组件叠加额外收益 批判点评:很经济的工程发现:把 seed 筛选问题转换为前几步 attention 信号读取,几乎没有计算开销;但这种基于 attention 的代理指标在跨架构(DiT/MMDiT)的可迁移性需要进一步验证;core token 的提取依赖 prompt parsing 的鲁棒性 趋势观察 「编辑」开始成为统一多模态模型的核心训练任务 — Uni-Edit 把智能编辑提为 UMM 单一通用训练任务,BAGEL/Janus-Pro 上一个数据集就能同时提理解/生成/编辑——「编辑作为通用任务」的认知正在替代「混合多任务训练」的范式。FullFlow 用同样的精简思路(只训 5% 参数)把 T2I 升级成双向多模态,从「重训」走向「升级」 视频生成加速进入「时空联合 + 稀疏注意力」阶段 — DVG 把渐进分辨率从单空间扩到时空联合,HunyuanVideo 上 7× 加速 + 蒸馏达 18×;BA-Att 用块预降采样稀疏注意力比 FlashAttention 还快 6.95×。视频扩散下一阶段的加速重心从单维度优化转向「时空 + 稀疏」组合拳 长视频生成从训练扩展走向「推理期方法」 — FlowLong 用 Tweedie matching 滑窗 training-free 把视频时长扩到数倍——这条 inference-time 路线和 Mutual Forcing/Causal Forcing++ 的训练侧路线形成互补,意味着长视频不一定要重新训模型 I2V 运动控制和文生图 seed 选择都被「单一标量旋钮 + Attention 信号」攻破 — DyMoS 用一个标量参数控 I2V 运动幅度(attention rebalance);ABSS 用初始几步 cross-attention 信号筛 seed——共同点是把「需要训练才能解决」的问题,转化为「读取已有 attention 信号」的免训练方案 概念擦除从 SFT 范式跨入 RL 范式 — FlowErase-RL 首次用 GRPO 做 Flow Matching 概念擦除,CE+NS 双路径动态奖励替代精对齐 SFT 数据——证明在 Flow Matching 时代,「擦除」本质上更适合用 RL 的分布偏移视角而非分类监督视角 人工智能炼丹君 整理 | 2026-05-21
-
AIGC 每日速读|2026-05-20|视频生成补物理常识NEWTON 今日 AIGC 论文速览 今日共 4 篇 · 物理常识与可控视频生成 2 篇 · 世界模型与实时交互 1 篇 · 高效音频生成 1 篇 重点论文标题列表 NEWTON:Agent 编排物理工具链补条件提物理常识 IAMFlow:免训练身份记忆解决长叙事视频漂移 Stable Audio 3:H200 上 2 秒生成数分钟变长音频 Incantation:自然语言每0.25秒控多实体19.7FPS 今日论文速览 1. NEWTON:Agent 编排物理工具链补条件提物理常识 NEWTON: Agentic Planning for Physically Grounded Video Generation | 浙江大学, 香港理工大学, IROOTECH/三一集团 | arXiv:2605.18396 关键词:视频生成·物理常识·Agentic Planning·VideoPhy-2·Flow-GRPO 前序问题:视频生成模型画面好看但系统性违反物理常识——VideoPhy-2 上最强模型 joint accuracy 仅 32.6%。论文把根源诊断为「条件规约瓶颈」:文本 prompt 是物理世界的有损压缩,遗漏了真正决定动力学的参数(速度/质量/碰撞角度),单纯堆模型容量补不回来从未被指定的信息 本文贡献:提出 NEWTON 框架:把视频生成「降级」为 agent 工具箱中的一个动作,由可学习的 planner 编排关键帧生成、科学计算、prompt 改写等物理感知工具构造丰富条件,再用 verifier 闭环迭代;planner 是唯一可训练组件,在多轮真实交互中用 Flow-GRPO 在线优化。提出物理条件需满足的三条性质:sufficiency / dynamism / verifiability 实验效果:VideoPhy-2 上 joint accuracy 显著提升:LTX-Video 21.4% → 29.7%(+8.3pp),Veo-3.1 30.7% → 37.4%(+6.7pp),关键是不修改任何视频生成器底模,只改 planner 批判点评:把视频生成嵌入 agent loop 是个聪明的 reframe——既然底模拿不到完整物理参数就别强求底模,把信息构造交给可推理的 planner;但 Flow-GRPO 的训练成本不低,物理工具链对生成时延的影响论文未充分披露,verifier 能否在更多元物理现象上稳定收敛仍待验证 2. IAMFlow:免训练身份记忆解决长叙事视频漂移 Advancing Narrative Long Video Generation via Training-Free Identity-Aware Memory | 浙江大学, 腾讯优图, 华中科大, 上海交大 | arXiv:2605.18733 关键词:长视频生成·身份记忆·训练免微调·叙事生成·NarraStream-Bench 前序问题:自回归长视频生成在视觉保真度和交互上进步快,但长序列里身份漂移、角色重复、属性丢失的问题严重;现有方案要么用预定义策略压缩历史帧,要么靠粗糙的隐式注意力检索关键帧,对「带角色切换的演化型 prompt」都处理不好 本文贡献:提出 IAMFlow 训练免微调身份感知记忆框架:用 LLM 从每个 prompt 抽实体并赋予全局唯一 ID,建立身份记忆;用 VLM 异步从渲染帧验证并修正属性,把隐式相似度匹配换成显式实体追踪。配套异步视觉验证 + 自适应 prompt 切换 + 模型量化的推理加速流水线,并发布 NarraStream-Bench 长叙事流式视频评测基准(324 个多 prompt 脚本) 实验效果:NarraStream-Bench 上整体最佳,比最强 baseline 高 2.56 分;60 秒多 prompt 生成相比最高效 baseline 还有 1.39× 加速,做到「质量更好且更快」 批判点评:把身份当作显式可寻址符号、用 VLM 异步验证属性,是把 agentic memory 思想正式带进长视频生成的工作;但训练免微调依赖 LLM/VLM 的稳定性和延迟,多角色密集交互场景下全局 ID 解析是否还稳健仍是开放问题;NarraStream-Bench 的 324 个脚本规模偏小,对极端长视频(>3 分钟)的覆盖度有限 3. Stable Audio 3:H200 上 2 秒生成数分钟变长音频 Stable Audio 3: Fast Latent Diffusion for Variable-Length Audio Generation | Stability AI | arXiv:2605.17991 关键词:音频生成·latent diffusion·变长生成·对抗后训练·消费级开源 前序问题:音频生成模型在「变长生成 + 编辑修补 + 推理速度 + 消费级硬件可跑」四件事之间往往要做妥协;以前的 SA1/SA2 在长度灵活性和速度上还有进一步压榨空间,且开源生态需要一个能在 MacBook 上几秒出结果的版本 本文贡献:推出 small/medium/large 三档变长音频 latent diffusion 模型;核心创新:(1) 新的 semantic-acoustic VAE 同时压缩音频且保留语义结构;(2) 支持 inpainting 做精细化音频编辑与短录音续写;(3) 对抗后训练(adversarial post-training)减少推理步数同时提升保真度与 prompt 贴合度;(4) 训练数据全部来自 licensed + Creative Commons 数据,规避版权风险 实验效果:H200 GPU 上不到 2 秒生成数分钟音乐/音效;MacBook Pro M4 上不到几秒生成;small/medium 权重 + 训练推理 pipeline 全开源,能在消费级硬件上跑 批判点评:Stability AI 用同一份开源策略持续做了 SA1/SA2/SA3 三代——这种「商用规避版权 + 真开源 + 真在消费硬件能跑」的工作工业价值最高;但 large 档不开源、对中文/中性别人声的覆盖度论文未深入披露、是否包含 vocal/mixing 级编辑也需后续测试 4. Incantation:自然语言每0.25秒控多实体19.7FPS Incantation: Natural Language as the Action Interface for Multi-Entity Video World Models | 上海交大, NVIDIA Research, USTC, UCAS, NUS, UWaterloo, HKUST, HKU, 紫光研究院 | arXiv:2605.18601 关键词:视频世界模型·自然语言动作接口·实时流式·Self-Forcing·跨游戏泛化 前序问题:当前交互式视频世界模型画质好但缺多实体细粒度控制和跨实体/跨世界泛化——根因在「动作接口」:标准控制协议(动画 ID、设备输入、场景级 caption)在设计期就把动作语义绑死到具体实体或引擎上,无法跨游戏迁移 本文贡献:首次把自然语言作为视频世界模型的动作接口:每 0.25 秒(1 个 latent frame)一条自然语言条件,原生支持同时多实体控制和跨实体概念迁移;架构是预训练双向视频底模 + frame-local text cross-attention;通过 ODE-initialized Self-Forcing 蒸馏 + RoPE-decoupled 滑窗 KV-cache 实现实时长 horizon 流式生成;同款架构和训练配方迁移到《拳皇》只需换 per-entity 动作词表 实验效果:跨实体迁移成功率 89% vs Action-Index baseline 43%;out-of-vocabulary prompts 90% vs 0%;2 步学生模型在 480p 上稳定 19.7 FPS,2 小时长 rollout 不发散,FVD 维持稳定;同时发布 Elden Ring 玩家-Boss 战斗剪辑数据集预览 批判点评:把世界模型的动作接口从「枚举 ID」升级到「自由语言」是非常正确的方向,跨实体 89% vs 43% 的提升清晰证明了价值;但训练数据是手工标注的游戏片段(Elden Ring/KOF),真实世界视频里语言 → 物理动作的映射可能远比游戏复杂;Self-Forcing 蒸馏依赖双向教师的瓶颈仍未解(参考 Mutual Forcing 路线的下一步演化方向) 趋势观察 视频生成把「物理 / 身份 / 多实体」推到 agent 接口层 — 今天的三篇视频文章都在做同一件事:把视频生成从「单 prompt → 一段画面」升级为「Agent 编排条件 + 显式记忆/接口」。NEWTON 用 planner+verifier 给视频生成补物理参数;IAMFlow 用 LLM/VLM 异步给长叙事维护身份记忆;Incantation 用自然语言每 0.25 秒控制多实体。共同点:底模不动,靠外层 agentic 结构补语义 物理常识成为视频生成评测的下一个高地 — NEWTON 在 VideoPhy-2 上把 LTX-Video 从 21.4% 推到 29.7%、Veo-3.1 从 30.7% 推到 37.4%——但绝对值仍不到 40%。视频生成的下一阶段评测从「画质」转向「物理可解释性」 长视频靠「显式身份记忆」而不是「KV 容量」 — IAMFlow 的关键观察:与其压缩历史帧,不如显式给每个实体一个全局 ID 并用 VLM 异步验证属性。这是把 LLM 时代成熟的 Memory/Retrieval 思想正式搬进视频生成的标志性工作 世界模型的动作接口正在自然语言化 — Incantation 把世界模型动作从「枚举 ID」升级为「自然语言每帧条件」,跨实体迁移 89% vs 43% 的提升说明这条路线确实可行——下一阶段的世界模型可能会全面采用语言作为控制信号 音频生成的开源生态在收敛 — Stable Audio 3 用 licensed + CC 数据 + small/medium 开源 + 消费级硬件,把 SA 系列做到了「研究者本地可玩」的硬件包络——这套打法可能会被音视频联合生成(如昨日的 Mutual Forcing)下一代复制 人工智能炼丹君 整理 | 2026-05-20 更多 AIGC 论文解读,关注微信公众号「人工智能炼丹君」 每日更新 · 论文精选 · 深度解读 · 技术脉络 微信搜索 人工智能炼丹君 或扫描下方二维码关注
-
AIGC 每日速读|2026-05-19|长视频生成FP4训推全栈LongLive-2.0 今日 AIGC 论文速览 今日共 13 篇 · 长视频生成与训推优化 2 篇 · 扩散推理加速与量化 4 篇 · 视频编辑与实时特效 2 篇 · 统一多模态生成 1 篇 · 音频生成与综述 2 篇 · 扩散 RL 后训练 2 篇 重点论文标题列表 LongLive-2.0:NVFP4 长视频生成训推全栈提速 2.15× TACache:Rectified Flow 训练免训练加速 4.14× Aurora:VLM Agent 把模糊指令拆解给视频编辑器 Lance:原生统一图像视频理解生成 MoE 模型 StreamingEffect:单 H200 实时 720p 人像视频特效 今日论文速览 1. LongLive-2.0:NVFP4 长视频生成训推全栈提速 2.15× LongLive-2.0: An NVFP4 Parallel Infrastructure for Long Video Generation | NVIDIA | arXiv:2605.18739 关键词:长视频生成·NVFP4·序列并行·AR 视频扩散·Song Han 前序问题:长视频生成的训练和推理同时卡在显存和速度上:现有 Self-Forcing 系列依赖 ODE 初始化 + DMD 蒸馏,流程冗长;推理端把 KV cache 与计算精度压不下去,使得分钟级、多镜头、可交互的 AR 视频生成在大模型规模下难以落地 本文贡献:提出 LongLive-2.0:首个 NVFP4 端到端长视频生成训练 + 推理基础设施。(1) 训练侧的 Balanced SP——把 teacher-forcing 布局与序列并行(SP)协同设计,在每个 rank 上配对干净历史 + 噪声目标的时间块,并搭配 SP-aware 分块 VAE 编码;(2) 直接把扩散模型微调成长时多镜头交互式 AR 模型,跳过 ODE 初始化 + DMD 蒸馏;(3) 推理侧 Blackwell 上跑 W4A4 NVFP4,KV cache 也量化到 NVFP4,配合异步流式 VAE 解码 实验效果:训练加速 2.15×、推理加速 1.84×;LongLive-2.0-5B 在保持 benchmark 强表现的同时达到 45.7 FPS 推理;可独立 LoRA 切换为 4 步 / 2 步实时生成模式,是首个面向长视频生成的 NVFP4 训推一体系统 批判点评:把 NVFP4 这种 Blackwell 新精度从推理推到训练全链路是工程级里程碑,5B 跑出 45.7 FPS 把长视频 AR 推到了实时门槛;但 NVFP4 对硬件的强绑定限制了非 Blackwell 集群的复现路径,量化 KV cache 在多镜头切换时的累积误差也值得长期追踪 2. TACache:Rectified Flow 训练免训练加速 4.14× Accelerating Rectified Flow Models via Trajectory-Aware Caching | 上海交大, 军事科学院, 华为 | arXiv:2605.16789 关键词:Rectified Flow·训练-free 加速·缓存·正交分解·扩散推理 前序问题:扩散与 Rectified Flow 模型靠迭代评估速度场出图/出视频,计算昂贵;现有 cache 方法靠跳步加速,但粗略的近似在长跳步区间累积误差大,激进加速下质量明显劣化 本文贡献:提出 TACache(Trajectory-Aware Cache)训练-free 加速框架,遵循「先跳步后补偿」范式:对 RF 轨迹上离散速度加速度做正交分解(平行 + 正交残差),分离每步近似误差的幅值与方向来源;离线阶段用幅值 / 方向累积阈值生成跳步表,在线阶段结合样本历史正交方向重构被跳过的速度,无需额外模型评估 实验效果:在 BAGEL、FLUX.1-dev、Wan2.1-1.3B 上分别实现文生图 4.14×、文生视频 2.11× 加速;在所有 reference-based fidelity 指标上一致优于已有 cache 类方法 批判点评:「先跳步后补偿」+ 速度加速度正交分解,把 cache 类方法从经验调参推到了误差可控的工程范式;但分解效果对模型与数据集分布敏感,离线统计在 prompt 分布漂移时是否仍稳定,还需要更长尾的验证 3. Aurora:VLM Agent 把模糊指令拆解给视频编辑器 Aurora: Unified Video Editing with a Tool-Using Agent | 罗切斯特大学, Adobe | arXiv:2605.18748 关键词:视频编辑·VLM Agent·工具调用·统一扩散·欠规范请求 前序问题:现有统一视频编辑模型把文本、源视频、参考图喂进同一个 DiT 一把搞定替换 / 删除 / 风格 / 参考插入;设计很灵活,但默认用户已提供了 model-ready 的文本、参考图与空间锚定——真实请求里这些往往缺失 本文贡献:提出 Aurora:把工具增强 VLM agent 与统一视频扩散 transformer 配对——agent 把原始用户请求映射成对齐 transformer 条件通道的结构化编辑计划,先解决「文本和视觉欠规范」再生成;用监督数据训练完整编辑规划 + 参考图选取,再用偏好对训练鲁棒工具调用与指令润色;并发布 AgentEdit-Bench 评估「欠规范用户请求」下的 agentic 视频编辑能力 实验效果:在 AgentEdit-Bench 与两个现有视频编辑 benchmark 上,Aurora 显著超越纯指令 baseline;VLM agent 还能迁移到其他冻结的视频编辑模型,作为通用前置规划层 批判点评:把视频编辑里「用户输入欠规范」这一真实痛点显式拆解给 VLM agent 处理,是务实且可迁移的范式;但 agent 错误规划带来的级联编辑错误尚未充分量化,agent + DiT 的端到端延迟也是落地前要解决的关键 4. Lance:原生统一图像视频理解生成 MoE 模型 Lance: Unified Multimodal Modeling by Multi-Task Synergy | 字节跳动 Intelligent Creation Lab | arXiv:2605.18678 关键词:统一多模态·MoE·双流架构·原生训练·图像视频生成 前序问题:统一多模态模型要么靠模型尺寸堆量、要么沿用图文为主的设计,在「图像 + 视频 × 理解 + 生成 + 编辑」的全格子上很难一并打通;理解和生成两条能力路径互相干扰,多模态 token 异质性也让位置编码难以兼顾 本文贡献:提出 Lance:原生轻量级统一多模态模型,从零训练,采用「双流 MoE + 共享交错多模态序列」架构——联合上下文学习同时把理解与生成的能力路径解耦;引入 modality-aware RoPE 缓解异质视觉 token 的相互干扰;训练采用分阶段多任务范式,配合自适应数据调度同时强化语义理解与视觉生成 实验效果:图像和视频生成上大幅超越现有开源统一模型,同时保持强多模态理解能力,证明统一不必靠堆参数,「能力路径解耦」是更可持续的统一范式 批判点评:「统一上下文 + 解耦能力路径」的设计直击当前统一模型最大痛点:什么都做但什么都不极致;不过双流 MoE 的训练稳定性、与闭源旗舰模型的差距,以及在更长视频上的可扩展性仍待时间检验 5. StreamingEffect:单 H200 实时 720p 人像视频特效 StreamingEffect: Real-Time Human-Centric Video Effect Generation | 新加坡国立 Show Lab | arXiv:2605.17019 关键词:视频编辑·实时流式·人像特效·因果蒸馏·VideoEffect-130K 前序问题:电商直播、娱乐、Vlog 等场景需要实时人像视频特效,但缺数据、缺可部署的编辑模型;视频编辑的高效蒸馏几乎没人做,现有加速大多围绕文生视频,无法保住身份、背景与时序一致性 本文贡献:提出 StreamingEffect:上下文式视频编辑架构 + 因果 AR 学生蒸馏,把采样从 50 步压到 4 步;支持关键帧控制——可以在线注入参考特效帧并沿流传播,实现交互式编辑;同时构建 VideoEffect-130K 数据集——70K 特效视频 + 60K 编辑视频、600 类特效,是已知最大的人像视频特效数据集 实验效果:在单张 H200 GPU 上实现实时高质量 720p 视频编辑,数据集和方法共同填补了「人像视频特效实时编辑」的开源生态空白 批判点评:把视频编辑显式当作「实时流式 + 关键帧可控」问题来解,配套 130K 高质量数据是最大的工程贡献;但 600 类特效的覆盖度、4 步学生在长流式生成下身份漂移、以及 H200 之外的部署门槛,是产品化关键考验 6. MeanFlow-LSE:MeanFlow 蒸馏推到 80B 工业级模型 Stabilizing, Scaling & Enhancing MeanFlow for Large-scale Diffusion Distillation | 西电, 腾讯混元 | arXiv:2605.17834 关键词:MeanFlow·扩散蒸馏·大规模训练·HunyuanImage·少步生成 前序问题:MeanFlow 因公式简洁、表现强劲在少步蒸馏受关注,但优化目标不稳定 + 「mean-seeking bias」限制了它在大规模工业模型上的应用,蒸馏到 12B / 80B 级别经常训练崩溃或质量塌陷 本文贡献:(1) 引入 warm-up 技术,用离散解替代原 MeanFlow 微分解,避免 stop-gradient 项含未训好模型导致的训练崩溃;等模型对平均速度场有初步拟合后再切回微分解继续精炼;(2) 引入轨迹分布对齐作为辅助目标,缓解极少步推理下复杂目标分布上的 mean-seeking bias,让学生模型轨迹分布贴近教师 实验效果:在 FLUX.1-dev(12B)上超越现有蒸馏方法;推到 80B 的 SOTA 工业模型 HunyuanImage 3.0,依然展现出鲁棒泛化与强表现,是首次把 MeanFlow 蒸馏验证到 80B 量级 批判点评:warm-up + 轨迹分布对齐两步组合直击 MeanFlow 在大模型上的两大顽疾,工程上意义重大;但 warm-up 阶段 / 切换时机依赖经验设定,对不同 backbone 的迁移性还需更系统消融 7. I2V-Survey:图生视频扩散首份系统综述 Image-to-Video Diffusion: From Foundations to Open Frontiers | 港城大, 格里菲斯大学等 | arXiv:2605.17248 关键词:图生视频·扩散综述·I2V·taxonomy·开放挑战 前序问题:图生视频(I2V)已成为生成模型的核心方向,对内容一致性、身份保留与运动连贯性的要求都比通用视频生成更严;但现有论文大多把 I2V 当作通用视频生成的子话题,缺乏专门的 taxonomy 与系统分析 本文贡献:把扩散 I2V 单独立题,系统梳理任务定义、模型架构、数据集、评测指标,并按架构和训练范式给出 taxonomy;进一步抽取 4 个核心设计——条件编码 / 时序建模 / 噪声先验 / 时空上采样,配合典型应用与开放挑战 实验效果:为 I2V 这一独立子方向提供首份结构化综述,给出可复用的 4 大设计轴和应用-挑战双视角,便于研究者和工程团队系统理解技术路径 批判点评:把 I2V 从「视频生成的角落」抬到独立子方向,「4 个核心设计 + taxonomy」是清晰可用的索引框架;但综述截止时间内未能覆盖最新一波因果 / 实时 I2V,未来需要持续更新追踪 8. WavFlow:原始波形空间直生高保真音频 WavFlow: Audio Generation in Waveform Space | Meta AI, 东北大学 | arXiv:2605.18749 关键词:音频生成·波形空间·Flow Matching·V2A·T2A 前序问题:现代音频生成几乎都依赖潜空间压缩,引入额外复杂度并潜在丢失信息;但波形空间维度极高、能量分布稀疏,让扩散模型直接在波形上建模长期失败 本文贡献:提出 WavFlow:直接在原始波形空间生成高保真音频,无中间表示。通过 waveform patchify 把音频重塑为 2D token grid,引入 amplitude lifting 对齐信号尺度,使 flow matching 中的 x-prediction 优化稳定;并构建自动化数据流水线,整理 500 万视频-文本-音频三元组,从零学习细粒度声学模式 实验效果:在视频转音频 VGGSound 上取得 FD_PaSST 59.98 / IS_PANNs 17.40 / DeSync 0.44;在文生音频 AudioCaps 上 FD_PANNs 10.63 / IS_PANNs 12.62,与已有潜空间方法持平或超越,证明中间压缩并非高质量音频合成的必要条件 批判点评:「不要 latent,直接干波形」是颇有勇气的反潮流路线,patchify + amplitude lifting 是让 flow 在波形上稳的关键工程;但波形 flow matching 的训练成本与采样开销比 latent 方案高得多,工业级落地需要更激进的加速 9. TAPE:时序感知 token 剪枝免训加速视频扩散 Temporal Aware Pruning for Efficient Diffusion-based Video Generation | 匹兹堡大学, IIT, Rutgers, Microsoft AI | arXiv:2605.17837 关键词:视频扩散·token 剪枝·训练-free 加速·时序一致性·ViT 前序问题:视频扩散 ViT 架构出视频质量高,但长时空序列上的注意力计算极贵;已有 token 剪枝多基于 attention、按帧独立操作,难以保住跨帧时序连贯,naive 应用会产生背景不稳、闪烁、画质下降 本文贡献:提出 TAPE 训练-free 时序感知剪枝:(i) 时序平滑对齐相邻帧的 token 重要性,抑制选择抖动;(ii) 在选定层做 token 重选,使剪枝匹配各层的不同语义关注,避免误差在特定区域累积;(iii) 时间步级预算调度——早期噪声重的步骤激进剪、后期保真关键步骤放宽 实验效果:显著提速的同时保持高视觉保真度,超越前期 token reduction 方法;作为 plug-in 训练-free 加速,能直接套到现有视频扩散模型上 批判点评:把 token 剪枝从「每帧独立」拉回「时序感知」是补足视频域专属约束的正确方向,三项设计互相协同;但激进时间步预算调度对极长视频的累积误差、以及 ViT 之外架构的迁移性仍是开放问题 10. SafeDiffusion-R1:在线 GRPO + CLIP 引导奖励安全对齐 SafeDiffusion-R1: Online Reward Steering for Safe Diffusion Post-Training | MBZUAI | arXiv:2605.18719 关键词:扩散安全·在线 RL·GRPO·CLIP 引导·内容审核 前序问题:扩散模型移除预训练中学到的不安全内容,现有方法要么需要昂贵的 unsafe-text 配 safe-image 监督数据,要么走离线 RL / SFT 在合成数据上训,灾难性遗忘严重,生成质量明显劣化,扩展性差 本文贡献:提出在线 RL 框架:在正负 prompt 上跑 GRPO;引入 steering reward 机制利用 CLIP 嵌入空间的固有性质——把文本表示推向正向安全方向、远离负向,无需为每个安全维度单独训 reward 模型;在线策略让模型从包括显式不安全 prompt 在内的多样请求中学习而不灾难性遗忘 实验效果:不当内容下降到 18.07%(vs SD v1.4 的 48.9%),裸露检测 15 vs baseline 646;GenEval 组合生成质量从 42.08% 提升到 47.83%;安全增益泛化到 7 类未见有害 prompt 类别 批判点评:把「安全对齐」从离线 SFT 推到在线 GRPO,叠加 CLIP 嵌入引导避开 reward 模型训练,工程友好且可扩展;但 CLIP 嵌入方向偏向、对抗性提示下 steering 的鲁棒性,仍需对抗压力测试持续追踪 11. CGPO:按 reward 方差自适应难度的文生图 RL Curriculum Group Policy Optimization: Adaptive Sampling for Unleashing the Potential of Text-to-Image Generation | 北邮, 中国电信 TeleAI | arXiv:2605.17807 关键词:文生图·GRPO·课程学习·自适应采样·RL 对齐 前序问题:文生图 RL(特别是 GRPO 系)训练时统一采样策略忽视了样本难度与模型当前能力的匹配,训练效率低,模型常在已掌握或还远不能掌握的 prompt 上空转 本文贡献:提出 CGPO 自适应课程训练框架:每条 prompt 生成一组图像由 reward 模型打分,用组内 reward 方差作为「prompt 不一致性」的在线 proxy——方差高说明模型部分掌握但未稳定,正是最该多采的可学习 prompt,从而提高其采样概率;再用比例公平优化做类别校准,平衡多类别数据集的训练难度 实验效果:在 GenEval、T2I-CompBench++、DPG Bench 上一致提升生成性能,为 GRPO 类文生图 RL 提供可即插即用的课程化增强 批判点评:用 reward 方差当「可学习 prompt」proxy 是优雅且无需额外标注的设计;但 reward 模型本身的偏差会被该 proxy 放大,长期训练下需要监控 reward hacking 12. DiRotQ:PCA 旋转感知 W4A4 DiT 量化 DiRotQ: Rotation-Aware Quantization for 4-bit Diffusion Transformers | d-Matrix | arXiv:2605.16732 关键词:DiT·4-bit 量化·PCA 旋转·W4A4·FLUX 前序问题:DiT 出图质量 SOTA 但推理代价高;激进 PTQ 到 4-bit 能省算力却经常严重掉点;已有 smoothing / mixed precision / rotation / low-rank residual 等方法都只能部分缓解,与 FP16/BF16 仍有可见差距 本文贡献:提出 DiRotQ W4A4 PTQ 框架——通过 PCA 找到激活方差主成分所在的低秩子空间,对该子空间用更高精度保留,其余分量量化到 4-bit;推理时用校准得到的正交变换把激活旋转到 PCA 基,逆旋转离线融入权重;再叠加 GPTQ 的权重量化形成完整 W4A4 系统,并给出 Triton kernel 端到端加速 实验效果:在 PixArt-Σ MJHQ-30K 上取得 FID 15.9 / PSNR 19.1 dB,超越 SVDQuant(FID 18.9 / 17.6);12B FLUX.1-dev 在单卡 RTX 4090 上显存降 2.1×,推理比 BF16 加速 2.3×;并首次提出 VLM-as-a-Judge 评测协议 批判点评:把 PCA 子空间高精度保留 + 离线融入权重的设计,把旋转量化做到了 W4A4 的较好均衡,落地友好;但 PCA 校准对长尾 prompt 的覆盖度、VLM-as-a-Judge 与人类偏好的对齐度,是后续要追踪的关键 13. SpectralProgressive:频谱先粗后细动态扩展分辨率 Spectral Progressive Diffusion for Efficient Image and Video Generation | Stanford | arXiv:2605.18736 关键词:频谱扩散·渐进分辨率·训练-free 加速·视频生成·去噪调度 前序问题:扩散模型在频域里隐式自回归生成——低频先出、高频后出;在噪声主导的早期对全分辨率做计算大量冗余,但目前没人把这一观察系统化用于推理加速 本文贡献:提出 Spectral Progressive Diffusion 通用框架——沿去噪轨迹渐进扩展分辨率;设计频谱噪声扩展机制,并从模型自身的功率谱推出最优分辨率调度;支持 training-free 加速和一种新的微调配方,进一步同时改善效率与质量 实验效果:在多个 SOTA 预训练图像和视频生成模型上获得显著加速,且画质保持;为预训练扩散模型提供一条「无需重训」的频谱渐进推理路线 批判点评:把扩散「频谱自回归」的隐式行为显式化为分辨率调度,思路清晰且与 cache 等加速正交;但频谱调度对噪声分布的假设强依赖训练分布,跨数据集与跨模态迁移性需更广验证 趋势观察 NVFP4 把长视频生成训推一体化推到实用门槛 — LongLive-2.0 把 NVFP4 从纯推理量化推到训练 + KV cache + 异步流式 VAE 解码全链路,5B 模型跑出 45.7 FPS——下一代视频生成基础设施开始与 Blackwell 硬件深度协同,长视频 AR 真正走向「可部署的实时」 扩散加速从 cache 推到「频谱 + 时序 + 量化」三路同时压榨 — TACache 从轨迹正交分解给跳步补偿、TAPE 从时序感知做 token 剪枝、SpectralProgressive 从频谱调度动态扩展分辨率、DiRotQ 从 PCA 旋转把 DiT 推到 W4A4——扩散推理优化第一次在「时间步 / 空间 token / 数值精度 / 频谱通道」四个轴上系统并进 视频编辑进入 agent 时代 — Aurora 把模糊用户请求交给 VLM agent 拆解成结构化编辑计划再喂给 DiT;StreamingEffect 配套 130K 数据 + 4 步因果蒸馏直接做实时人像特效——视频编辑从「模型一把吃下所有输入」转向「agent 解码意图 + 模型专注生成」 统一多模态从堆参数走向「能力路径解耦」 — Lance 用「双流 MoE + 共享交错序列」把理解与生成的能力路径显式解耦,配合 modality-aware RoPE 处理 token 异质性;证明轻量原生设计也能在「图像 + 视频 × 理解 + 生成 + 编辑」全格子上同时领先 扩散 RL 对齐从 reward 工程走向 reward 机制 — SafeDiffusion-R1 用 CLIP 嵌入做 steering reward 替代专门 reward 模型;CGPO 把 reward 方差当 prompt 难度 proxy 实现自适应采样——扩散 RL 后训练正在从「堆 reward 模型」转向「挖 reward 信号本身的几何」 人工智能炼丹君 整理 | 2026-05-19 更多 AIGC 论文解读,关注微信公众号「人工智能炼丹君」 每日更新 · 论文精选 · 深度解读 · 技术脉络 微信搜索 人工智能炼丹君 或扫描下方二维码关注
-
AIGC 周末专题|2026-05-17|实时自回归视频生成加速 AIGC 周末专题深度解读:实时自回归视频生成:从蒸馏加速到流式交互的范式突破 人工智能炼丹君 整理 | 2026年5月17日(周日) 覆盖时间:2026-05-11 ~ 2026-05-16 本期概述 本期 AIGC 周末专题聚焦实时自回归视频生成:从蒸馏加速到流式交互的范式突破方向,精选 8 篇代表性论文进行深度解读。 方向分布: 自回归蒸馏加速 4 篇 (Causal Forcing++, AnyFlow, RAVEN, CDM) 流式推理与 KV Cache 优化 3 篇 (Forcing-KV, SWIFT, HSA) 世界模型与多镜头叙事 2 篇 (SANA-WM, CausalCine) 含 NVIDIA/MIT 联合 × 2 技术路线与时间线 基础蒸馏时代(2022.06 — 2024.06) 描述:Progressive Distillation 开创渐进蒸馏路线,Consistency Models 提出端点一致性映射,少步生成从理论走向实践。 关键节点: 2022.06:Progressive Distillation:渐进蒸馏开山作 2023.03:Consistency Models:一步生成理论突破 2023.12:DMD/DMD2:分布匹配蒸馏 2024.06:SD-Turbo/SDXL-Turbo:1-4 步商用 因果 AR 蒸馏兴起(2024.06 — 2025.12) 描述:Self Forcing 开创 AR 视频蒸馏范式,Causal Forcing 将 chunk-wise 4 步推向可用,流式视频生成原型出现。 关键节点: 2024.09:Self Forcing:AR 视频蒸馏开创 2025.02:Causal Forcing:chunk-wise 4 步实用 2025.06:Genie3:action-conditioned 世界模型 2025.12:LongLive:长视频流式生成 实时化爆发期(2026.01 — 2026.05) 描述:Frame-wise 蒸馏、KV Cache 压缩、无训练加速三线并进,实时交互式视频生成从实验室走向产品。 关键节点: 2026.03:CDM:连续时间分布匹配突破离散瓶颈 2026.05:Causal Forcing++:frame-wise 2 步实时 2026.05:AnyFlow:Flow Map 恢复步数可扩展性 2026.05:Forcing-KV/SWIFT:单卡 20-29 FPS 世界模型与叙事融合(2026.03 — 未来) 描述:实时 AR 视频生成与世界模型、多镜头叙事融合,从'生成画面'走向'仿真世界'。 关键节点: 2026.05:SANA-WM:消费级 GPU 分钟级世界模型 2026.05:CausalCine:多镜头叙事 AR 生成 未来:实时世界仿真 + 用户交互式导演 1. Causal Forcing++:因果一致性蒸馏实现 Frame-wise 2 步实时视频生成:清华 TSAIL 将因果 AR 蒸馏从 chunk-wise 4 步推进到 frame-wise 2 步,首帧延迟降低 50% 论文: Causal Forcing++:因果一致性蒸馏实现 Frame-wise 2 步实时视频生成 arXiv: 2605.15141 机构: Tsinghua TSAIL, 生数科技 (Shengshu) 1.1 研究动机 核心问题: Frame-wise AR 蒸馏的初始化策略与少步目标错位 实时交互式视频生成需要低延迟、流式、可控的 rollout。Causal Forcing 等先驱已经证明 chunk-wise 4 步蒸馏的可行性,但 chunk 粒度过粗——每生成 16 帧需 4 步 DiT forward pass,首帧延迟仍以秒计。如果能做到 frame-wise 1-2 步,每帧只需 1-2 次 forward pass,延迟可再降一个量级。问题是:现有蒸馏初始化策略要么目标错位、要么不能少步生成、要么算力大到无法 scale。 前序工作及局限: Causal Forcing:Chunk-wise 4 步成功但延迟仍高 Consistency Models:提供一致性蒸馏理论基础 与前序工作的本质区别: Causal CD 只需一次教师 ODE 步在线监督,三阶段初始化解决冷启动 1.2 方法原理 Causal Forcing++ 解决的核心问题是:如何在 frame-wise 粒度做高效的因果 AR 蒸馏?关键观察:Causal Consistency Distillation 学的流图与 Causal ODE 蒸馏完全等价,但训练信号更简洁——只需教师模型做一步 ODE 更新,学生学习匹配该更新结果。这避免了传统蒸馏需要预计算完整 PF-ODE 轨迹的巨大开销。 三阶段初始化解决冷启动:(1) 双向扩散预训练让模型学习高质量生成能力;(2) 因果适配将双向注意力切换为因果 mask,保持生成质量同时获得 AR 属性;(3) 少步蒸馏在上述基础上训练 frame-wise 1-2 步推理。 进一步将流水线扩展到 Genie3 风格 action-conditioned 世界模型,用相同 Causal CD 范式蒸馏交互式世界模型,支持动态 action 实时驱动。 1.3 核心创新 提出 Causal CD(因果一致性蒸馏)流水线:核心观察是 Causal CD 学习与 Causal ODE 蒸馏相同的 AR 条件流图,但只需在相邻时间步之间用一次教师 ODE 步在线提供监督,无需预计算完整 PF-ODE 轨迹——既高效又易优化。三阶段初始化策略彻底解决 frame-wise 蒸馏的冷启动问题。 1.4 实验结果 在 frame-wise 2 步设定下,全面超越 SOTA 4 步 chunk-wise Causal Forcing:VBench Total +0.1、VBench Quality +0.3、VisionReward +0.335。首帧延迟降低 50%。Stage 2 训练成本降至约 1/4。扩展到世界模型同样有效。 1.5 关键洞察 [{'point': '教师 ODE 误差放大', 'detail': '1-2 步生成使教师单步 ODE 的离散化误差直接影响学生最终输出,误差没有后续步骤修正的机会'}, {'point': '世界模型场景的 action 复杂度', 'detail': '在简单 action 下表现优秀,但面对复杂多步交互指令时的稳定性需要更多压力测试'}, {'point': '未开源', 'detail': '论文来自产业实验室,复现需等待官方代码公开'}] 技术演进定位: Frame-wise 因果 AR 蒸馏的实时交互级方案 可能的后续方向: Frame-wise 1 步 端到端无分阶段初始化 2. AnyFlow:任意步数视频蒸馏的 Flow Map 统一框架:NUS Show Lab + MIT + NVIDIA 首次基于 Flow Map 实现 4→32 步性能单调提升 论文: AnyFlow:任意步数视频蒸馏的 Flow Map 统一框架 arXiv: 2605.13724 机构: National University of Singapore Show Lab, MIT, NVIDIA 2.1 研究动机 核心问题: Consistency Distillation 步数增加时性能退化 过去一年的少步视频生成被一致性蒸馏(Consistency Distillation)统治——4-8 步即可出图。但一个致命问题:把步数从 4 加到 16/32,画质反而崩溃。为什么?CD 用一致性轨迹替换了原始 PF-ODE 轨迹,破坏了 ODE 采样在测试时的可扩展行为。用户需要'任意步数'推理的灵活性——算力充裕时多步出精品,紧急场景少步求速度——但 CD 做不到。 前序工作及局限: Consistency Models:端点映射 z_t→z_0 破坏 ODE 语义 Shortcut Models:任意区间跳跃但未系统化 与前序工作的本质区别: Flow Map z_t→z_r 目标 + FMBS on-policy 训练恢复步数可扩展性 2.2 方法原理 AnyFlow 的核心洞察:一致性蒸馏学的是 z_t→z_0 的端点映射,这迫使模型'一步到位'——当允许多步时,中间状态没有明确的 ODE 语义,因此步数越多反而越混乱。 Flow Map 解决方案:不学端点映射,而是学任意时间区间 [t, r] 的流图过渡 z_t→z_r。当 r=0 退化为一步生成,当 r>0 退化为多步 ODE 采样的某一段——自然统一了少步和多步。 FMBS 训练方法:传统蒸馏是 off-policy 的——用教师 ODE 生成配对 (z_t, z_r)。AnyFlow 提出 on-policy 方法:让学生自身做 Euler rollout,在 rollout 路径上反向模拟真实的流图过渡,用于训练。这解决了视频域因果生成的 exposure bias 问题。 在双向 DiT(Open-Sora Plan)和因果 AR(CausalVAR)两类骨干、1.3B 到 14B 全规模区间验证。 2.3 核心创新 提出 AnyFlow——首个基于 flow map 的任意步数视频扩散蒸馏框架。核心突破:(1) 将蒸馏目标从端点一致性 z_t→z_0 升级为流图过渡 z_t→z_r(任意时间区间),让学生学会任意区间跳跃;(2) Flow Map Backward Simulation (FMBS) 把完整 Euler rollout 拆为多段 shortcut,用 on-policy rollout 替代 off-policy 配对蒸馏。 2.4 实验结果 在双向和因果两类视频扩散骨干上一致达到或超越 consistency baseline。关键突破:步数从 4 提升到 16/32 时性能不再退化、反而单调上升,重新恢复了 ODE 采样的 test-time scaling 优势。在 14B 模型上同样有效。 2.5 关键洞察 [{'point': '复现门槛高', 'detail': '需要 1B-14B 级别教师模型 + 大规模 on-policy rollout,数据与算力两端门槛都不低'}, {'point': '具体数值缺失', 'detail': '论文未公开 VBench/UCF-FVD 等标准 benchmark 的绝对数值,难以与其他方法直接对比'}, {'point': '训练效率', 'detail': 'On-policy rollout 的训练时间和显存开销与 off-policy CD 的对比数据不够充分'}] 技术演进定位: 首次理论解释 CD 多步退化并给出 flow map 解决方案 可能的后续方向: 自适应步数调度 Flow Map + RL 结合 3. RAVEN:训练-测试对齐的实时自回归视频外推:帝国理工 AGI Lab 提出 CM-GRPO 在一致性核上直接做 RL 论文: RAVEN:训练-测试对齐的实时自回归视频外推 arXiv: 2605.15190 机构: Imperial College London AGI Lab 3.1 研究动机 核心问题: 因果视频蒸馏训练用真实 history、推理用自身 rollout 的分布 gap 因果自回归视频扩散模型通过蒸馏高保真双向教师已能实现少步推理。但一个根本性问题一直被忽视:训练时用真实 history(来自数据集)作为条件,推理时却用模型自身 rollout 的结果作为 history——两者分布不同。随着 rollout 长度增加,这个训练-测试分布 gap 会累积放大,导致长序列生成质量严重退化。 前序工作及局限: Self Forcing:self-rollout 训练但未系统性解决对齐 GRPO:RL 对齐但在扩散模型上公式复杂 与前序工作的本质区别: RAVEN rollout 重打包 + CM-GRPO 在一致性核上做 RL 3.2 方法原理 RAVEN 解决的核心问题是训练-测试分布不对齐。具体做法:训练时不再只用真实数据作为 history 条件,而是让模型先做一段 rollout 生成'假 history',然后把这个 rollout 的干净端点重新打包为条件输入,让模型在自身 rollout 分布上继续学习。这样训练时看到的 history 分布就与推理时一致。 CM-GRPO 的创新在于简化了 RL 在生成模型上的应用。传统 flow-model RL 需要构造 Euler-Maruyama 辅助过程来定义 policy gradient,复杂且不稳定。CM-GRPO 的观察:consistency model 的每步采样本质上是条件高斯转移 p(z_{t-1}|z_t) = N(μ(z_t), σ²I),可以直接在这个高斯核上定义 log-probability 并做 GRPO——公式简洁、梯度稳定。 两者组合:RAVEN 让模型在正确分布上训练,CM-GRPO 让模型朝奖励方向优化。 3.3 核心创新 提出 RAVEN training-time test 框架:把每次自身 rollout 重打包为(干净历史端点 + 噪声去噪状态)交错序列,让训练注意力对齐推理时的外推方式。进一步提出 CM-GRPO:把 consistency 采样步重新表达为条件高斯转移,直接在该核上做在线 RL,避免了 flow-model RL 中 Euler-Maruyama 辅助过程的复杂性。 3.4 实验结果 RAVEN 在质量、语义、动态度多维评测上超越近期因果视频蒸馏 baseline。CM-GRPO 与 RAVEN 组合后进一步提升性能。训练-测试对齐效果在长序列(>100 帧)上尤为显著。 3.5 关键洞察 [{'point': '内存开销', 'detail': 'RAVEN 重打包需要额外存储 rollout 结果,对长序列的内存占用影响未充分量化'}, {'point': '奖励设计敏感性', 'detail': 'CM-GRPO 的效果强依赖于奖励函数设计,在更复杂/多维奖励场景下的稳定性有待验证'}, {'point': '模型规模验证', 'detail': '在更大模型尺度(>5B)上是否同样有效需要进一步实验'}] 技术演进定位: 系统性解决因果视频蒸馏训练-测试对齐的首个完整方案 可能的后续方向: 多奖励 CM-GRPO 自适应 rollout 长度 4. Forcing-KV:注意力头特化驱动的 KV Cache 混合压缩:NVIDIA/MIT/ETH 联合发现注意力头功能特化规律,单卡 H200 达 29+ FPS 论文: Forcing-KV:注意力头特化驱动的 KV Cache 混合压缩 arXiv: 2605.09681 机构: NVIDIA, MIT, ETH Zurich, ZJU 4.1 研究动机 核心问题: AR 视频扩散历史帧 KV Cache 线性膨胀导致显存爆炸 自回归视频扩散模型(如 Self Forcing)通过流式生成实现了开放式长视频合成。但致命瓶颈来了:随着生成帧数增加,历史帧的 KV Cache 线性膨胀——注意力复杂度爆炸 + 显存不够用。一段 30 秒的 1080P 视频,KV Cache 就能吃掉整张 H100 的 80GB 显存。如果不压缩 KV Cache,流式视频生成就永远停留在几秒级别。 前序工作及局限: Flash Attention:算法层面加速但不压缩缓存 Token Merging:图像域 token 压缩 与前序工作的本质区别: 发现注意力头功能特化并据此设计静态/动态混合压缩 4.2 方法原理 Forcing-KV 的核心发现:在自回归视频扩散模型中,不同注意力头承担完全不同的功能角色,这种分工是稳定且可预测的。 静态头特征:注意力分布集中在远程 token(历史帧的关键区域),负责跨 chunk 的语义连续性和帧内的结构保真。这些头对'哪些远程 token 重要'的判断高度一致,因此可以做结构化剪枝——只保留少数高注意力权重的远程 token。 动态头特征:注意力集中在近邻 token(前几帧),负责帧间运动预测和局部一致性。近邻帧之间往往高度相似,因此可以做相似度驱动的动态剪枝——当相邻片段的 KV 向量相似度超过阈值时合并。 工程实现:KV-cache 同步机制确保压缩后的 cache 在多 head 之间保持一致的时间索引;缓存 Euler 更新将已压缩 token 的 denoising 中间状态缓存起来避免重复计算。 4.3 核心创新 首次发现视频扩散模型中注意力头具有稳定的功能特化:静态头(Static Heads)负责跨 chunk 过渡和帧内保真,关注远程 token;动态头(Dynamic Heads)负责帧间运动与一致性,关注近邻 token。基于此设计混合压缩:对静态头执行结构化剪枝(保留远程关键 token),对动态头执行基于片段相似度的动态剪枝(移除冗余近邻)。 4.4 实验结果 在 LongLive 和 Self Forcing 两个 AR 视频扩散模型上验证。480P 场景:1.35x/1.50x 加速。1080P 场景:加速比达 2.82x。单卡 H200 达到 29+ FPS 并减少 30% cache 显存。无需离线 profiling,运行时自动判断头类型。 4.5 关键洞察 [{'point': '架构通用性', 'detail': '仅在两个 AR 视频扩散模型上验证,是否推广到非 AR 架构(如 CogVideoX)有待检验'}, {'point': '头分类稳定性', 'detail': '静态/动态头的划分是否在新架构或不同训练阶段仍然成立存疑'}, {'point': '质量退化分析', 'detail': '在极端压缩比下(如 80%+ 裁剪)的视觉质量退化模式需要更多系统性分析'}] 技术演进定位: 首次揭示视频扩散注意力头分工并实现实时 29 FPS 可能的后续方向: 自适应头分类 hierarchical cache 5. SWIFT:无训练语义自适应记忆实现高效流式长视频:中科大/复旦/Georgia Tech 提出逐头语义注入,单卡 H100 达 22.6 FPS 论文: SWIFT:无训练语义自适应记忆实现高效流式长视频 arXiv: 2605.09442 机构: University of Science and Technology of China, Fudan University, Georgia Institute of Technology 5.1 研究动机 核心问题: 流式长视频 prompt 切换时 KV Cache 管理困难 流式长视频生成的核心挑战之一是语义切换——当 prompt 变化时(例如从'人走路'切换到'人跑步'),模型需要在保持视觉连贯性的同时响应新语义。现有方法在 prompt 边界处要么重建整个 KV Cache(慢),要么固定缓存大小无法适配语义变化(质量差)。 前序工作及局限: StreamingT2V:滑动窗口但无语义感知 ControlNet/P2P:注入控制但非流式 与前序工作的本质区别: 无训练语义注入代替缓存重建,逐头梯度化更新 5.2 方法原理 SWIFT 解决的问题:流式视频生成中 prompt 切换时如何高效更新记忆? 传统做法是在 prompt 边界处清空并重建 KV Cache,这造成两个问题:(1) 重建开销大,打断流式生成的实时性;(2) 清空历史信息可能导致前后帧视觉不连贯。 SWIFT 的做法完全不同:不清空缓存,而是把新 prompt 的语义'注入'到已有 cache 中。具体实现:计算每个注意力头当前 KV 状态与新 prompt 特征的对齐度(余弦相似度),对齐度高的头已经自然适配新语义(少注入),对齐度低的头需要更多新信息(多注入)。 自适应动态窗口:不同 prompt 阶段的记忆需求不同——刚切换时需要大窗口保持过渡平滑,稳定后可缩小窗口节省显存。SWIFT 根据生成帧数和语义稳定度自动调整窗口大小。 关键优势:完全无训练,可直接插入任何因果视频扩散模型。 5.3 核心创新 提出 SWIFT(Semantic Windowing and Injection for Flexible Transitions)无训练框架:(1) 语义注入缓存增强——不重建缓存,而是将新 prompt 语义注入已有缓存中;(2) 逐头语义注入——每个注意力头按自身与当前视频状态的对齐度决定接收多少新语义更新;(3) 自适应动态窗口——按 prompt 阶段分配时间记忆容量。 5.4 实验结果 在保持生成质量的同时,单卡 H100 上达到 22.6 FPS。多 prompt 长视频(>200 帧)的语义切换平滑度显著优于重建方案。与 Self Forcing 等 AR 模型即插即用兼容。 5.5 关键洞察 [{'point': '语义对齐度计算延迟', 'detail': '逐头计算语义对齐度本身引入额外延迟,在极端实时场景下可能成为瓶颈'}, {'point': '双向注意力适用性', 'detail': '仅在因果视频扩散模型上验证,对双向注意力架构是否同样有效存疑'}, {'point': '复杂语义切换', 'detail': '在多重、快速的语义切换场景下(如 5 秒内切换 3 次 prompt)的稳定性未充分验证'}] 技术演进定位: 首个无训练的流式语义切换方案 可能的后续方向: 与 KV 压缩组合 多模态条件注入 6. CDM:连续时间分布匹配蒸馏:阿里/南开提出动态连续调度,从离散锚定进化到连续流形优化 论文: CDM:连续时间分布匹配蒸馏 arXiv: 2605.06376 机构: Alibaba, Nankai University 6.1 研究动机 核心问题: DMD 离散锚定导致少步生成伪影 DMD(Distribution Matching Distillation)是少步扩散蒸馏的主流范式之一,但有个根本缺陷:它在离散时间步上做分布匹配——只在 {0, 0.25, 0.5, 0.75, 1.0} 等稀疏锚点对齐分布。这种离散锚定加上反向 KL 散度的模式寻求特性,容易产生视觉伪影和过度平滑。通常需要额外的 GAN 判别器或奖励模型来修补,系统复杂度极高。 前序工作及局限: DMD/DMD2:离散时间步分布匹配 Progressive Distillation:渐进蒸馏但步数固定 与前序工作的本质区别: 连续时间采样 + 轨迹偏离匹配,移除 GAN/奖励辅助 6.2 方法原理 ![Overview of Continuous-Time Distribution Matching (CDM). Top: Our approach employs a dynamic continuous time schedule during backward simulation, sampling intermediate anchors uniformly from $(0, 1]$. Bottom Left: CFG augmentation (CA) and distribution matching (DM) operate on this dynamic schedule to align text-image conditions and data distributions at on-trajectory anchors. Bottom Right: To address inter-anchor inconsistency, the proposed CDM objective explicitly extrapolates off-trajectory latents ($x_t_i'$) using the predicted velocity.](https://jefxiong-1304293246.cos.ap-shenzhen-fsi.myqcloud.com/AIGC/20260516/2605.06376_1.png) CDM 的核心洞察:DMD 之所以需要 GAN 和奖励模型修补,是因为离散锚定注定了'覆盖不全'——轨迹上 99% 的点没有监督信号,模型在这些无监督区域自由飘移。 解决方案:把分布匹配从离散点扩展到连续流形。具体实现:(1) 训练过程中不再用固定时间步集合 {t₁, t₂, ...},而是在 [0,1] 上连续采样匹配点,采样概率密度随训练动态调整——模型薄弱的区域被更频繁地采样;(2) 对齐目标不再局限于 ODE 轨迹上的点,还主动采样轨迹附近的'偏离点'——这迫使模型学习在轨迹邻域内也保持良好的分布匹配。 效果:连续调度消除了离散锚定的覆盖空洞,偏离匹配增强了模型在采样扰动下的鲁棒性。两者组合后,即使不用 GAN 和奖励模型,视觉质量也能匹配甚至超越带这些辅助模块的方案。 6.3 核心创新 将 DMD 框架从离散锚定首次迁移到连续优化:(1) 动态连续调度——允许在任意轨迹点(而非预设锚点)做分布匹配,采样点随训练自适应调整;(2) 连续时间对齐目标——主动在偏离 ODE 轨迹的位置做匹配,增强鲁棒性。无需 GAN、无需奖励模型等复杂辅助模块。 6.4 实验结果 ![Empirical evidence of schedule decoupling. (a) Conventional distillation strictly anchors backward simulation to predefined discrete inference timesteps. In contrast, our dynamic scheduling optimizes over uniformly sampled continuous timesteps $t (0, 1]$ at each iteration. (b) Visually, the dynamically scheduled model produces finer details and fewer artifacts than the strictly aligned baseline. (c) Quantitatively, it also attains a higher HPSv3 score, indicating that exact discrete alignment is not only unnecessary but in fact restrictive---motivating our continuous-time formulation.](https://jefxiong-1304293246.cos.ap-shenzhen-fsi.myqcloud.com/AIGC/20260516/2605.06376_2.png) 在 SD3-Medium 和 Longcat-Image 上展示了高度竞争力的少步生成视觉保真度。4 步 FID 达到接近 50 步教师的水平。代码已开源(GitHub)。无需 GAN 或奖励模型的极简架构降低了工程复杂度。 6.5 关键洞察 [{'point': '训练开销', 'detail': '连续调度增加了每步的采样复杂度,实际训练时间和显存开销的对比数据不够充分'}, {'point': '视频域验证缺失', 'detail': '仅在图像模型上验证,视频域的时序一致性是否同样受益未知'}, {'point': '与 CD 方法对比', 'detail': '与 Consistency Distillation 的直接对比较少,两者互补性未探讨'}] 技术演进定位: 分布匹配蒸馏从离散走向连续的进化 可能的后续方向: 视频域连续调度 自适应精度匹配 7. SANA-WM:2.6B 参数分钟级世界模型的算力民主化:NVIDIA/MIT/港科大提出 Hybrid Linear DiT,单卡 RTX 5090 生成 60s 720p 论文: SANA-WM:2.6B 参数分钟级世界模型的算力民主化 arXiv: 2605.15178 机构: NVIDIA, MIT, HKUST 7.1 研究动机 核心问题: 分钟级世界模型训练和推理都需要海量资源 分钟级世界模型是通往具身智能和虚拟环境仿真的必经之路。但现有方案面临三重困境:(1) 画质要求媲美产业级大模型(LingBot-World、HY-WorldPlay),(2) 训练需要海量闭源数据和数百张 GPU,(3) 推理需要多卡集群。结果是:开源社区几乎没有可用的分钟级世界模型。 前序工作及局限: Genie2/3:分钟级但闭源/昂贵 SANA:高效图像生成架构 与前序工作的本质区别: Hybrid Linear Attention + 公开数据 + 量化蒸馏 → 消费级 GPU 7.2 方法原理 SANA-WM 的核心挑战:如何用有限资源做出质量不差的分钟级世界模型? Hybrid Linear Attention:纯 softmax attention 的 O(n²) 复杂度在分钟级视频(数千帧)上不可承受。SANA-WM 将 frame-wise 的 Gated DeltaNet(线性复杂度,处理帧内 token)与跨帧的 softmax attention(处理时序依赖)混合——帧内用线性、帧间用 softmax,总复杂度接近 O(n)。 Dual-Branch Camera Control:世界模型需要精确的 6-DoF 相机控制。SANA-WM 设计双分支:一个分支处理相机轨迹的全局运动趋势,另一个处理局部帧间旋转/平移细节,两者融合后注入 DiT。 数据方案:不依赖闭源数据,而是从公开视频(WebVid 等)自动提取 metric-scale 6-DoF 相机姿态作为 action 标签。标注流水线基于 DUSt3R + SLAM,全自动无人工。 推理优化:蒸馏 + NVFP4 量化,在单张 RTX 5090 上 34 秒生成 60s 720p clip。 7.3 核心创新 提出 SANA-WM:首个面向分钟级视频生成的开源高效世界模型。三大技术突破:(1) Hybrid Linear Attention——frame-wise Gated DeltaNet 与 softmax attention 混合,长上下文内存 O(n) 可控;(2) Dual-Branch Camera Control——保证 6-DoF 轨迹精确跟随;(3) 鲁棒标注流水线——从公开视频自动提取 metric-scale 6-DoF 相机姿态。 7.4 实验结果 仅用约 213K 公开视频片段、64 张 H100 训练 15 天。单 GPU 即可生成 60s 720p clip。蒸馏量化版在单卡 RTX 5090 上 NVFP4 下 34 秒完成。在 1 分钟世界模型 benchmark 上动作跟随精度强于现有开源 baseline,画质相当但吞吐高 36 倍。 7.5 关键洞察 [{'point': 'Refiner 依赖', 'detail': '1 分钟生成仍依赖 stage-2 refiner 外置模块,端到端质量与商业闭源仍有差距'}, {'point': '场景多样性', 'detail': '213K 公开视频的场景覆盖度有限,复杂室内/多物体交互场景可能生成质量不稳定'}, {'point': '6-DoF 精度', 'detail': '自动标注的 6-DoF 姿态精度受限于 DUSt3R/SLAM 的能力,在快速运动或低纹理场景可能有偏差'}] 技术演进定位: 首个面向消费级硬件的开源分钟级世界模型 可能的后续方向: 多模态 action 物理引擎耦合 8. CausalCine:多镜头叙事的实时自回归视频生成:港科大/蚂蚁/上交提出内容感知记忆路由 CAMR 支持动态镜头切换 论文: CausalCine:多镜头叙事的实时自回归视频生成 arXiv: 2605.12496 机构: HKUST, Ant Group, SJTU 8.1 研究动机 核心问题: AR 视频模型无法处理多镜头叙事中的镜头转换 现有自回归视频模型解决了'开放式生成'——可以无限延伸画面。但电影叙事不是无限延伸单一场景——它需要事件演进、视角切换、镜头边界。当用户说'先拍远景,然后切到近景,再来个俯拍'时,现有 AR 模型将其视为单一长序列延伸,结果:运动停滞、语义漂移、无法处理镜头转换。 前序工作及局限: Self Forcing:单镜头流式生成 MovieGen:多镜头但非 AR/非实时 与前序工作的本质区别: CAMR 内容感知路由 + 多镜头训练数据构建 8.2 方法原理 CausalCine 解决的核心问题:如何让 AR 视频模型理解'镜头'概念? 传统 AR 视频模型把所有帧当作同质序列——前一帧和后一帧的关系是'延续'。CausalCine 引入镜头边界的概念:同一镜头内的帧关系是'延续',跨镜头帧关系是'切换'——两者需要完全不同的记忆策略。 CAMR (Content-Aware Memory Routing) 的具体做法:不使用固定的滑动窗口来管理历史 KV Cache,而是让每个新 token 通过注意力得分动态选择'回忆什么'。镜头切换时,与新镜头语义相关的历史(如同一人物的远景)被高权重检索,无关历史(如前一场景的背景细节)被低权重淡化。 这本质上是一种学习到的'选择性遗忘'——让模型在保持叙事连贯性(人物/故事线)的同时,允许视觉内容的突变(场景切换)。 最后蒸馏为少步实时生成器,保持交互式特性。 8.3 核心创新 将多镜头视频生成转化为在线导演过程:(1) 在原生多镜头序列上训练因果基础模型,学习复杂的镜头转换先验(淡入淡出/硬切/运镜等);(2) 提出 Content-Aware Memory Routing (CAMR)——按注意力相关性动态检索历史 KV 条目而非固定窗口,让镜头切换时记忆'该忘的忘、该记的记'。 8.4 实验结果 显著超越自回归基线,接近双向模型能力。多镜头叙事的连贯性(人物一致性、情节连续性)在主观评测中远超现有 AR 方案。支持动态 prompt 实时切换——生成中途改变指令,模型自动执行镜头切换。 8.5 关键洞察 [{'point': '训练数据获取', 'detail': '原生多镜头视频的镜头边界标注获取成本未讨论,是否需要大量人工标注'}, {'point': '蒸馏后多样性', 'detail': '蒸馏为少步生成器后,镜头转换的多样性(淡入/硬切/运镜等)是否被压缩到少数模式'}, {'point': '长叙事稳定性', 'detail': '超过 10 个镜头的长叙事中,人物一致性是否能稳定维持'}] 技术演进定位: 首个面向多镜头叙事的实时 AR 视频框架 可能的后续方向: 分镜自动规划 多角色追踪 横向对比与技术脉络总结 横向对比:本周实时视频生成技术路线对比 论文 核心方法 推理步数 单卡速度 是否需要训练 视频长度 是否开源 Causal Forcing++ 因果一致性蒸馏 Frame-wise 2 步 未公布 FPS 需蒸馏训练 开放式流式 未开源 AnyFlow Flow Map 任意步数蒸馏 4-32 步灵活 未公布 FPS 需蒸馏训练 标准长度 待开源 RAVEN 训练-测试对齐 + CM-GRPO 少步(具体步数未公布) 未公布 FPS 需 RL 训练 开放式流式 待开源 Forcing-KV KV Cache 混合压缩 与基模型一致 29+ FPS (H200) 无训练推理优化 开放式长视频 待开源 SWIFT 语义注入缓存 与基模型一致 22.6 FPS (H100) 完全无训练 多 prompt 长视频 待开源 CDM 连续时间分布匹配 4 步 标准推理 需蒸馏训练 图像(待扩展视频) 已开源 SANA-WM Hybrid Linear DiT 多步(+量化加速) 34s/60s clip (5090) 需完整训练 60s 分钟级 已开源 CausalCine 内容感知记忆路由 少步(蒸馏后) 实时级 需多镜头训练 多镜头叙事 待开源 核心技术趋势 因果自回归蒸馏从 chunk-wise 4 步推向 frame-wise 1-2 步,实时交互成为现实 Causal Forcing++ 证明因果一致性蒸馏可以在 frame 粒度实现高质量 2 步生成,首帧延迟降低 50%,解锁了真正的流式交互式视频生成 训练-推理分布对齐成为自回归视频蒸馏的核心议题 RAVEN 通过 rollout 重打包直接弥合训练时 teacher history 与推理时 student rollout 的分布 gap,配合 CM-GRPO 实现端到端对齐 KV Cache 压缩与自适应记忆方案使流式视频生成在单卡上实现 20-30 FPS Forcing-KV 发现注意力头的功能特化规律(静态/动态),SWIFT 提出无训练语义注入方案,两者分别在 H200 和 H100 单卡上实现实时吞吐 世界模型正在从封闭系统走向开源、从秒级走向分钟级 SANA-WM 以 2.6B 参数 + 213K 公开视频在单卡 RTX 5090 上生成 60s 720p 视频,吞吐比闭源方案高 36 倍,标志着世界模型的算力民主化 核心技术难点与开放问题 四大核心难点 1. 少步生成的质量天花板 当采样步数降到 1-2 步,模型本质上在做'条件预测'而非'迭代去噪'。Causal Forcing++ 在 2 步下已接近 4 步水平,但与 50 步教师仍有可见差距。AnyFlow 通过 flow map 让多步时性能恢复,但 1-2 步仍是瓶颈。核心问题:少步生成的理论质量上界在哪里? 2. 长序列的累积误差与遗忘 所有 AR 模型都面临长序列退化:RAVEN 通过训练-测试对齐缓解,Forcing-KV/SWIFT 通过 cache 管理控制,CausalCine 通过 CAMR 选择性遗忘。但 1000+ 帧的真正长视频中,这些方案能否持续有效?'选择性遗忘'与'不该遗忘'之间的精确边界难以界定。 3. 蒸馏与 RL 对齐的统一 本周出现三条竞争路线:Causal CD(蒸馏为主)、AnyFlow(flow map 蒸馏)、CM-GRPO(RL 对齐)。它们解决不同层面问题但目前各自为战——是否存在一个统一框架,先 flow map 蒸馏获得任意步数能力,再 CM-GRPO 对齐到人类偏好? 4. 实时生成的硬件民主化 Forcing-KV 在 H200、SWIFT 在 H100、SANA-WM 在 RTX 5090 上实现实时/近实时。但消费级 GPU(如 RTX 4090 甚至 RTX 4060)上呢?真正的用户端实时体验需要把算力需求再降一个量级,这可能需要蒸馏+量化+剪枝+cache 压缩的全栈优化。 今日讨论 自回归视频生成已经进入'实时'门槛——Forcing-KV 29 FPS、SWIFT 22.6 FPS、Causal Forcing++ frame-wise 2 步。下一步的核心问题是:实时生成的质量天花板在哪里?当采样步数降到 1-2 步,模型本质上在做'条件预测'而非'迭代去噪',这对视觉保真度的根本影响是什么?AnyFlow 通过 flow map 让步数可伸缩、RAVEN 通过 RL 对齐推理分布——这两条路线谁更有可能统一少步和多步的质量-速度曲线? 人工智能炼丹君 整理 | 数据来源:arXiv 2026-05-11 ~ 2026-05-16 更多 AIGC 论文解读,关注微信公众号「人工智能炼丹君」 每日更新 · 论文精选 · 深度解读 · 技术脉络 微信搜索 人工智能炼丹君 或扫描下方二维码关注
-
AIGC 每日速读|2026-05-15|实时视频2步出帧Causal Forcing++ 今日 AIGC 论文速览 今日共 8 篇 · 实时 AR 视频与世界模型 3 篇 · 相机控制与视频生成 2 篇 · 图像编辑持续学习 1 篇 · 扩散模型 RL 后训练 1 篇 · 视频世界模型评测 1 篇 重点论文标题列表 Causal Forcing++:因果一致性蒸馏 Warp-as-History:把相机引起的形变直接转化为「相机扭曲 ACE-LoRA:动态正则化框架 RefDecoder:参考条件视频 VAE decoder DiffusionOPD:多任务训练范式 今日论文速览 1. Causal Forcing++:因果一致性蒸馏 Causal Forcing++: Scalable Few-Step Autoregressive Diffusion Distillation for Real-Time Interactive Video Generation | 清华 TSAIL, 生数科技 | arXiv:2605.15141 关键词:少步AR视频·因果一致性蒸馏·实时交互生成·世界模型·Genie3 前序问题:实时交互式视频生成需要低延迟、流式、可控的 rollout。现有自回归扩散蒸馏在 chunk-wise 4 步取得了不错效果,但 chunk 粒度过粗、采样延迟仍然不可忽略;当尝试更激进的 frame-wise 1-2 步时,少步 AR 学生的初始化策略要么目标错位、要么不能少步生成、要么算力代价大到无法 scale 本文贡献:提出 Causal Forcing++ 因果一致性蒸馏(Causal CD)流水线:核心观察是 Causal CD 学习与 Causal ODE 蒸馏相同的 AR-条件流图,但只需在相邻时间步之间用一次教师 ODE 步在线提供监督,无需预先计算并存储完整 PF-ODE 轨迹——既高效又易优化;进一步把流水线扩展到 Genie3 风格的 action-conditioned 世界模型 实验效果:在 frame-wise 2 步设定下,全面超越 SOTA 4 步 chunk-wise Causal Forcing:VBench Total +0.1、VBench Quality +0.3、VisionReward +0.335,同时首帧延迟降低 50%、Stage 2 训练成本降至约 1/4 批判点评:把蒸馏从 chunk-wise 4 步推进到 frame-wise 2 步,是实时交互式视频生成可用性上的关键一步——把瓶颈识别为「初始化」是非常贴切的诊断;但 1-2 步生成对教师 ODE 误差的放大效应、以及在更复杂 action 条件下的稳定性还需更多压力测试 2. Warp-as-History:把相机引起的形变直接转化为「相机扭曲 Warp-as-History: Generalizable Camera-Controlled Video Generation from One Training Video | 上海交大, 上海 AI Lab | arXiv:2605.15182 关键词:相机控制·视频生成·零样本·伪历史·LoRA 微调 前序问题:相机可控视频生成已经很成熟,但现有方法普遍需要在大规模带相机标注的视频上做后训练(额外的 camera encoder、控制分支、注意力/位置编码改造);training-free 方案则把代价转嫁到测试时优化或 denoising 时的额外 guidance,依然不便宜 本文贡献:提出 Warp-as-History:把相机引起的形变直接转化为「相机扭曲后的伪历史」,在 frozen 视频生成模型自带的「视觉历史」通路中喂进去——目标帧位置编码对齐、剔除没有有效观测来源的 token,无需训练或架构改动即可零样本服从相机轨迹;可选用一段相机标注视频做轻量 LoRA 微调进一步提升泛化能力 实验效果:在多个数据集上的实验显示:完全 training-free 即可让冻结视频生成模型获得不平凡的相机轨迹跟随能力;只用「一段」相机标注视频做 LoRA 微调,即可在未见视频上同时改善相机贴合度、画质与运动动态 批判点评:把相机可控问题视作「历史 warp」是一个非常优雅的视角,几乎不增加任何训练成本;但 zero-shot 能力依赖底模的「视觉历史」通路是否足够强,没有该通路的扩散视频模型迁移性可能受限;另外极端轨迹下的孔洞填充质量值得关注 3. ACE-LoRA:动态正则化框架 ACE-LoRA: Adaptive Orthogonal Decoupling for Continual Image Editing | 上海交大, vivo AI Lab | arXiv:2605.14948 关键词:持续学习·图像编辑·LoRA·正交解耦·CIE-Bench 前序问题:现有 SOTA 扩散模型靠参数高效微调(LoRA 等)适配各类图像编辑任务,但真实业务需要在不断到来的新任务上持续学习同时保留旧任务能力;图像编辑的持续学习问题至今几乎没人系统研究,灾难性遗忘问题严重 本文贡献:提出 ACE-LoRA 动态正则化框架:通过 Adaptive Orthogonal Decoupling 自动识别并正交化任务间干扰,再用 Rank-Invariant Historical Information Compression 解决持续更新中的可扩展性瓶颈;同时发布 CIE-Bench——业内首个面向图像编辑的持续学习评测基准 实验效果:在指令保真度、视觉真实感、抗遗忘鲁棒性上一致优于现有 baseline,建立了「图像编辑持续学习」这一子方向的标准方法+标准评测 批判点评:把「持续学习」首次正式带到图像编辑领域,问题设定和 benchmark 都非常务实;但 14 维基因式正交化的超参对任务序列分布的鲁棒性、以及面对几十个长尾编辑任务时压缩策略的极限,需要更长任务流的实测 4. RefDecoder:参考条件视频 VAE decoder RefDecoder: Enhancing Visual Generation with Conditional Video Decoding | University of Washington, UNC | arXiv:2605.15196 关键词:视频 VAE·参考条件 decoder·视频生成·即插即用·VBench 前序问题:主流 latent 视频扩散模型的 denoising 网络条件丰富,但 VAE decoder 几乎都是无条件的——这种结构性不对称导致细节流失、与输入参考图不一致,是当前视频生成「看起来糊糊的」的隐藏元凶 本文贡献:提出 RefDecoder 参考条件视频 VAE decoder:用一个轻量图像编码器把参考帧映射成细节丰富的高维 token,在 decoder 每个 upsampling stage 与去噪后的视频 latent token 共同处理(reference attention),让 decoder 也获得与 denoising 网络对等的条件信息 实验效果:在 Wan 2.1、VideoVAE+ 等多个 decoder backbone 上一致提升 PSNR 最多 +2.1dB(Inter4K / WebVid / Large Motion);可直接热插拔进现有视频生成系统,无需额外微调,VBench I2V 上主体一致性、背景一致性、综合质量全面提升;天然泛化到风格迁移、视频编辑精修等任务 批判点评:这是一项「补条件」的低风险高收益工作,可即插即用是工程师最爱的属性;但 decoder 端注入参考可能在大幅运动场景下与 latent 表示冲突,长视频累积误差与 reference token 选择策略仍有优化空间 5. DiffusionOPD:多任务训练范式 DiffusionOPD: A Unified Perspective of On-Policy Distillation in Diffusion Models | 阿里 Wan Team, 复旦 | arXiv:2605.15055 关键词:扩散模型 RL·On-Policy 蒸馏·多任务·Wan Team·文生图 前序问题:强化学习是改进文生图扩散模型的强力工具,但现有方法大多局限于单任务优化——多任务联合 RL 受困于跨任务干扰和不平衡,级联 RL 又笨重且易遗忘 本文贡献:提出 DiffusionOPD 多任务训练范式:先独立训练任务专属 teacher,再沿学生自己的 rollout 轨迹做 Online Policy Distillation 把多 teacher 能力蒸馏到统一学生;理论上首次把 OPD 框架从离散 token 提升到连续状态 Markov 过程,给出闭式 per-step KL 目标,统一 SDE 与 ODE refinement,方差更低、泛化更好 实验效果:一致超越多奖励 RL 与级联 RL 基线,训练效率与最终性能两端均占优,在所有评测基准上达到 SOTA 批判点评:把 OPD 严格地搬上连续扩散是漂亮的理论延伸,多任务版本对落地非常有价值;但 teacher 数量增加后蒸馏的 token-level KL 是否仍稳定、teacher 与学生 capacity 失配时的下界,仍需更大规模实验 6. RAVEN:框架 RAVEN: Real-time Autoregressive Video Extrapolation with Consistency-model GRPO | 帝国理工 AGI Lab | arXiv:2605.15190 关键词:实时 AR 视频·一致性模型·CM-GRPO·训练-测试对齐·流式生成 前序问题:因果自回归视频扩散模型靠把过去内容外推未来 chunk 实现实时流式生成,蒸馏自高保真双向教师后已能少步推理;但训练时 history 分布与推理时实际 rollout 分布之间的 gap 一直限制长序列的生成质量 本文贡献:提出 RAVEN training-time test 框架:把每次自身 rollout 重打包为「干净历史端点 + 噪声去噪状态」交错序列,让训练注意力对齐推理时的外推方式,同时让下游 chunk loss 监督未来预测所依赖的历史表示;进一步提出 CM-GRPO,把 consistency 采样步重新表达为条件高斯转移,直接在该核上做在线 RL,避免了之前 flow-model RL 公式中的 Euler-Maruyama 辅助过程 实验效果:RAVEN 在质量、语义、动态度多维评测上超越近期因果视频蒸馏 baseline;CM-GRPO 与 RAVEN 组合后进一步提升性能 批判点评:把 training-test 不一致问题正面解决并配套 CM-GRPO 是组合拳;但 RAVEN 重打包对长序列内存占用的影响、CM-GRPO 在更复杂奖励上的稳定性,还需要在更大模型尺度上验证 7. SANA-WM:2.6B 参数原生面向 1 SANA-WM: Efficient Minute-Scale World Modeling with Hybrid Linear Diffusion Transformer | NVIDIA, MIT, 港科大 | arXiv:2605.15178 关键词:世界模型·分钟级视频·Hybrid Linear Attention·6-DoF 相机·开源 前序问题:一分钟级别的世界模型既要画质媲美 LingBot-World、HY-WorldPlay 这些产业级大模型,又要在算力、数据、推理硬件三方面都「能用得起」——目前几乎没有开源方案能同时做到 本文贡献:提出 SANA-WM:2.6B 参数原生面向 1 分钟视频生成的开源世界模型——(1) Hybrid Linear Attention 把 frame-wise Gated DeltaNet 与 softmax attention 混合,长上下文内存可控;(2) Dual-Branch Camera Control 保证 6-DoF 轨迹精确跟随;(3) 两阶段生成 + long-video refiner;(4) 鲁棒标注流水线从公开视频中提取 metric-scale 6-DoF 相机姿态作为动作标签 实验效果:仅用约 213K 公开视频片段、64 张 H100 训练 15 天,每个 60s 720p clip 单 GPU 即可生成;蒸馏量化版可在单卡 RTX 5090 上 NVFP4 量化下 34 秒生成 60s 720p;在 1 分钟世界模型 benchmark 上动作跟随精度强于现有开源 baseline,画质相当但吞吐高 36 倍 批判点评:把「分钟级世界模型」做到能在单张消费卡上跑动,是世界模型走向开发者手里的关键一步;但 1 分钟仍然依赖「stage-2 refiner」这一外置模块,端到端 1 分钟生成质量与商业闭源仍有差距 8. PDI-Bench:几何一致性量化框架 Quantitative Video World Model Evaluation for Geometric-Consistency | UCSD, 港科大等 | arXiv:2605.15185 关键词:视频世界模型·几何一致性·评测基准·3D 重建·物理推理 前序问题:生成视频模型越来越被当作隐式世界模型来研究,但「生成视频是否产生了物理合理的 3D 结构与运动」一直缺乏客观度量——现有评测要么靠人工打分要么靠学习式 grader,对几何失败的诊断力都很弱 本文贡献:提出 PDI-Bench(Perspective Distortion Index)几何一致性量化框架:先用 SAM 2、MegaSaM、CoTracker3 抽取物体级观测,单目重建到 3D 世界坐标,再算三类射影几何残差——尺度-深度对齐、3D 运动一致性、3D 结构刚性;配套 PDI-Dataset 覆盖多种压力测试场景 实验效果:在多个 SOTA 视频生成器上揭示了通用感知指标完全捕获不到的「几何特定失败模式」,为「物理基础视频生成 / 物理世界模型」的进展提供了可诊断信号 批判点评:把视频世界模型评测从「看起来对不对」推进到「几何上对不对」是必要的下一步,依托成熟 3D 工具链让指标可复现;但单目重建本身的误差对 PDI 指标的噪声有多大、对真实开放世界长尾场景的覆盖度,是后续要补的关键证据 趋势观察 实时交互视频生成进入 frame-wise 时代 — Causal Forcing++ 把少步 AR 视频从 chunk-wise 4 步压缩到 frame-wise 2 步,首帧延迟降一半;RAVEN 用 training-time test + CM-GRPO 直击 history 分布漂移——实时交互视频已经从「能动」进入「秒级响应」 相机控制从「重训」走向「零样本 + 一段视频微调」 — Warp-as-History 把相机条件转译为 frozen 模型自带的视觉历史通路,零样本即跟随;只用一段视频做 LoRA 即可泛化到未见素材——相机可控视频生成从「依赖大规模标注」滑向「轻数据即用」 VAE decoder 不再是哑终端 — RefDecoder 指出主流视频扩散模型 decoder 长期处于「无条件」状态,导致细节流失;用 reference attention 给 decoder 也加上条件,PSNR 直接 +2.1dB——decoder 端的条件化正成为视频生成的下一个低悬果实 世界模型走向消费级硬件 — SANA-WM 用 Hybrid Linear Attention + 量化在单卡 RTX 5090 上跑出 34 秒生成 60 秒 720p——分钟级世界模型第一次具备了「开发者本地可玩」的硬件包络 评测从感知质量转向几何/物理一致性 — PDI-Bench 把视频世界模型的考评从「看起来真不真」转到「几何上对不对」,借助成熟 3D 工具链给出射影几何残差——这预示着视频生成下一阶段的评测竞赛是「物理可解释性」 人工智能炼丹君 整理 | 2026-05-15 更多 AIGC 论文解读,关注微信公众号「人工智能炼丹君」 每日更新 · 论文精选 · 深度解读 · 技术脉络 微信搜索 人工智能炼丹君 或扫描下方二维码关注
-
AIGC 每日速读|2026-05-14|视频扩散从少步到任意步AnyFlow 今日 AIGC 论文速览 今日共 6 篇 · 视频扩散与推理加速 2 篇 · 图像生成与表征 2 篇 · 图像编辑与对齐评测 1 篇 · RL 后训练方法论 1 篇 重点论文标题列表 AnyFlow:——首个基于 flow map AsymFlow:rank-asymmetric ⚡ Qwen-Image-VAE-2.0:高压缩 VAE 套件 Edit-Compass:EditReward-Compass Orthrus:双视图框架 今日论文速览 1. AnyFlow:——首个基于 flow map AnyFlow: Any-Step Video Diffusion Model with On-Policy Flow Map Distillation | 新加坡国立大学 Show Lab, MIT, NVIDIA | arXiv:2605.13724 关键词:视频扩散·Flow Map·On-Policy 蒸馏·Any-Step·推理加速 ⚠️ 前序问题:近一年的少步视频生成几乎被一致性蒸馏(Consistency Distillation)统治,4-8 步即可出图,但只要把采样步数从 4 加到 16/32 画质反而塌——CD 用一致性轨迹替换了原始 PF-ODE 轨迹,破坏了 ODE 采样在测试时的可扩展行为,无法服务「任意步数」推理需求 本文贡献:提出 AnyFlow——首个基于 flow map 的任意步数视频扩散蒸馏框架:(1) 把蒸馏目标从端点一致性映射 z_t→z_0 升级为流图过渡 z_t→z_r,让学生学会任意时间区间的跳跃;(2) Flow Map Backward Simulation 把完整 Euler rollout 拆为多段 shortcut,用 on-policy rollout 替代 off-policy 配对蒸馏,缓解少步采样的离散化误差和因果生成的 exposure bias 实验效果:在双向 DiT 与因果两类视频扩散骨干、1.3B 到 14B 全规模区间一致达到或超越 consistency baseline;当步数从 4 提升到 16/32 时性能不再退化、反而单调上升,重新恢复了 ODE 采样的 test-time scaling 优势 批判点评:把蒸馏目标从端点一致性升级到任意区间流图是范式级创新,FMBS 的 on-policy 反向模拟在视频域是首次系统化提出;但论文未公开 VBench/UCF-FVD 等具体数值,复现门槛在 1B-14B 教师 + 大规模 on-policy rollout,数据与算力两端都不低 2. AsymFlow:rank-asymmetric Asymmetric Flow Models | Stanford, ETH | arXiv:2605.12964 关键词:Flow Matching·像素扩散·非对称参数化·FLUX.2·文生图 ⚠️ 前序问题:高维像素空间下做 flow matching 速度预测时,模型必须建模与图像同维的高维噪声,即使数据本身有强低秩结构也只能用满秩参数化硬扛,导致像素扩散与潜空间模型间长期存在显著质量差距 本文贡献:提出 AsymFlow:rank-asymmetric 速度参数化——噪声预测限制在低秩子空间、数据预测保持满维,不改网络结构与训练/采样流程即可解析恢复完整速度;首次给出潜空间预训练→像素空间微调的可行路径,让 FLUX.2 klein 9B 的潜空间先验直接初始化像素生成 实验效果:ImageNet 256×256 取得 1.57 FID,大幅超越同类 DiT/JiT 像素扩散;从 FLUX.2 klein 9B 微调出的像素文生图模型在 HPSv3、DPG-Bench、GenEval 上全面超越其潜空间基模,主观真实感显著提升 批判点评:rank-asymmetric 视角直击像素扩散的本质瓶颈,无侵入式参数化是工程甜点;但低秩子空间的秩选择、与 FLUX.2 这种顶级模型的耦合是否过强、跨数据集泛化能力都还需更大规模验证 3. Qwen-Image-VAE-2.0:高压缩 VAE 套件 Qwen-Image-VAE-2.0 Technical Report | Alibaba Qwen Team | arXiv:2605.13565 关键词:图像 VAE·高压缩·文本渲染·扩散兼容·视觉分词器 ⚠️ 前序问题:高压缩比 VAE 在重建保真度和 diffusability 之间长期难以兼得——压得越狠下游 DiT 越难训,文本密集场景(文档、海报)的字符更是首当其冲糊掉 本文贡献:提出 Qwen-Image-VAE-2.0 高压缩 VAE 套件:架构上引入 Global Skip Connections + 扩展潜空间通道;训练上用十亿级图像 + 合成渲染引擎专项强化文本场景;潜空间用增强语义对齐策略让其更适合扩散建模;编解码器采用非对称 + attention-free 主干降低编码开销 实验效果:在公开重建基准上达到 SOTA;提出 OmniDoc-TokenBench 文档专项评测,在高压缩比下兼顾通用与文本场景;下游 DiT 实验显示其 diffusability 显著优于现有高压缩基线,收敛速度明显加快 批判点评:把 VAE 当成独立产品打磨——文档专项 benchmark + 文本渲染合成数据是务实的工程亮点;但相对其他高压缩 VAE 的提升幅度需等论文公开数值后比较,「diffusability」的量化定义仍偏经验 4. Edit-Compass:EditReward-Compass Edit-Compass & EditReward-Compass: A Unified Benchmark for Image Editing and Reward Modeling | 字节跳动 Doubao Team 等 | arXiv:2605.13062 关键词:图像编辑·Reward Model·多维评测·RL 对齐·Benchmark ⚠️ 前序问题:现有图像编辑 benchmark 难度不足、评测维度粗放,已无法区分前沿模型;与此同时图像编辑 RL 越来越依赖 reward model,但 reward model 评测仍停留在脱离实际 RL 场景的设定上,导致编辑模型与 reward model 都缺少可靠裁判 本文贡献:提出 Edit-Compass + EditReward-Compass 统一评测套件:前者含 2,388 条精标实例,覆盖世界知识推理、视觉推理、多图编辑等六级递进任务,采用结构化推理 + 细粒度 rubric 多维评分;后者含 2,251 对偏好对,模拟真实 RL 优化中的 reward 场景 实验效果:为前沿编辑模型提供了能拉开差距的多维难度梯度,配套的 reward model 评测能反映 RL 训练中 reward model 的真实表现,为后续编辑模型与 reward model 的迭代提供统一坐标系 批判点评:把「编辑能力」和「reward model 能力」两条评测线收编进同一套 benchmark 是踏实的基础工作;2,251 对偏好对的标注一致性、reward 评测对真实 RL 收益的预测力,是这类工作走向社区共识的关键门槛 5. Orthrus:双视图框架 Orthrus: Memory-Efficient Parallel Token Generation via Dual-View Diffusion | Adobe Research, University of Oregon | arXiv:2605.12825 关键词:并行解码·扩散语言模型·KV Cache·推理加速·双视图 ⚠️ 前序问题:自回归 LLM 生成保真度高但串行解码慢,扩散语言模型可并行却质量退化、训练贵、收敛缺乏严格保证——视觉/多模态 token 生成场景同样面临「快」与「准」难以兼得 本文贡献:提出 Orthrus 双视图框架:在冻结的 AR LLM 上挂载一个轻量可训练扩散并行视图,两视图共用同一份高保真 KV Cache——AR 头负责 prefill 构建准确表征、扩散头负责并行解码;通过两视图共识机制保证无损推理,把扩散并行解码移植到 Transformer 几乎零侵入 实验效果:在保证完全等价生成(lossless)的前提下,相比纯自回归提供最高 7.8x 加速,KV Cache 内存仅增加 O(1),参数增量极小;为视觉/多模态自回归 token 生成提供直接可用的并行加速路线 批判点评:把扩散当成 AR 的「并行外设」而不是替代品,借共识机制保留 AR 保真度,工程上很优雅;但 7.8x 加速属上限值,真实任务下并行步内的拒绝率与吞吐曲线值得进一步给出,扩散头训练成本也未充分披露 6. Beyond-GRPO:奖励分配原则 Beyond GRPO and On-Policy Distillation: An Empirical Sparse-to-Dense Reward Principle for Language-Model Post-Training | Meta | arXiv:2605.12483 关键词:LLM 后训练·GRPO·On-Policy 蒸馏·奖励密度·稀疏到稠密 ⚠️ 前序问题:在「可验证标注极其稀缺」的后训练场景下,主流做法(在部署模型本身上跑 GRPO)忽视了一个奖励密度原则:稀疏的序列级奖励应该用在能产生有效探索的强模型上、稠密的 token 级奖励才适合把行为压缩进小模型,这一直觉对生成模型的 RL 对齐同样关键 本文贡献:提出 Sparse-to-Dense 奖励分配原则:把宝贵的可验证数据先「上游」给强 teacher 跑 GRPO 做探索,再以稠密蒸馏的形式「下游」灌给小学生,最后在学生侧再补一段稀疏 RL;具体配方为 forward-KL warmup → OPD on-policy → 学生侧 GRPO 的三段桥 实验效果:在 Qwen3-1.7B 学生固定的前提下,先在 8B teacher 上 RL 再蒸馏全面优于直接在学生上 GRPO;学生侧后续 GRPO 把 MATH 从 75.4% 提升到 78.5%、比 replay baseline 高 2.8 分,AIME 端点也最强 批判点评:「奖励密度」的视角让 GRPO 与 OPD 不再对立而成同一光谱的两端,对资源紧张团队的实践指导价值很高;但结论建立在数学这一可验证任务上,对图像/多模态生成等弱验证任务能否平移仍待验证 趋势观察 视频扩散从「少步」走向「任意步」 — AnyFlow 把蒸馏目标从端点一致性升级到任意区间的 flow map,叠加 on-policy 反向模拟,让一个学生模型在 1/4/16/32 步上都呈现良性 scaling——少步视频生成第一次有了真正的「test-time 预算自由度」 像素扩散借势潜空间预训练 — AsymFlow 用 rank-asymmetric 速度参数化把高维噪声预测限制在低秩子空间,并首次跑通了「FLUX.2 klein 9B 潜空间→像素空间」的微调路径——像素扩散与潜空间扩散开始走向「初始化共享、后期分化」的新协作方式 VAE 不再是配角,而是产品 — Qwen-Image-VAE-2.0 把高压缩 VAE 当作独立产品打磨:Global Skip Connections + 扩展通道 + 文档专项 benchmark,承认了「VAE 决定 DiT 上限」的事实,VAE 进入「文本可读、扩散友好、推理便宜」的三维竞赛 编辑模型与 reward model 同台同尺 — Edit-Compass 把「图像编辑能力」和「reward model 能力」并入同一评测套件,并把 reward model 评测从脱节场景改造成贴合 RL 实战的偏好对——前沿编辑模型的 RL 对齐第一次有了配套的统一坐标系 稀疏-稠密奖励分配成为后训练新共识 — Beyond-GRPO 给出一条简单规则:稀缺可验证数据先在强 teacher 上做稀疏 RL,再以稠密蒸馏下沉到小学生,最后学生侧补稀疏 RL;这一原则同样适用于多模态生成模型的 reward 分配,正在成为下一代 alignment pipeline 的骨架 人工智能炼丹君 整理 | 2026-05-14